너무 정신없이 링크만 정리해 놓으면서 글이 혼잡해졌다.
지금까지의 상황과 방향을 정리해본다.
로봇에 관심을 갖다보니 ROS를 알게되었고
Modern robotic를 공부하며 로봇에서 configuration을 위해서 tf가 중요함을 알게되었다.
ROS를 직접해보고자 했는데
개발환경세팅에만 많은 시간을 써버린 느낌적인 느낌이다.
바로 인공지능을 활용하겠다는 생각이었는데..ㅎㅎ
되겠지~가 아니라 하나하나 파고들어 되게 만들어야 했다.
PC 환경(노트북)
OS : 우분투 18.04
ROS : Melodic
CPU : i5
Hardware
Openmanipulator-X (ROBOTIS)
OpenCR
1. Moveit으로 Openmanipulator-X 동작시키기도(완료)
1.1 다이나믹셀-OpenCR-remotePC 연결 후 moveit
참조링크 : emanual.robotis.com/docs/en/platform/openmanipulator_x/ros_controls/
제어보드(OpenCR)를 ArduinoIDE로 펌웨어 업로드하여 PC와 연결시키고
다이나믹셀을 펌웨어 초기화하고 ID, 통신속도를 재설정하며 모터를 연결시켰다.
그럼에도 노트북상의 컨트롤러가 다이나믹셀을 인식하지 못했는데
많은 시간을 투자한 결과 소스코드에서 U2D2에 맞게 디폴트되어 있던 포트명을 OpenCR에 맞도록 변경시켜주자 해결할 수 있었다.
*U2D2의 포트명은 ttyUSB0, OpenCR의 포트명은 ttyACM0이다.
그 이후로 간단하게 컨트롤러와 gui로 로봇팔을 task place, joint place에서 조작하기, Moveit으로 로봇팔 조작하기를 수행할 수 있었다.

2. Pick&Place with 물체학습: 카메라로 물체인식 후 물체별로 저장된 경로로 동작수행 (예정)
참조링크 : suho0515.blogspot.com/2019/11/pick-and-place-using-inceptionv3-in-ros.html
로보티즈에서 제공하는 예제소스인 Master-Slave를 수정하여 카메라 앞에 물체를 보여주면 물체에 따라 지정된 경로를 따라 움직임을 수행한다.
예제코드를 수정하고고 물체를 학습시키기 위해서 학습기능을 담당할 다른 노드를 만들어야 하는데 때문에 난이도가 상당이 어렵게 느껴졌다.
3. Pick&Place with ar마크인식(진행중)
3.1 라즈베리파이 카메라 - remotePC 연결
참조링크:emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/
노트북pc와 라즈베리파이 각각에서 ~/.bashrc을 수정해 와이파이 통신이 가능하게 만든다.
결과적으로 리모트pc인 노트북의 터미널에서 아래 명령어로 라즈베리파이에 접속할 수 있다.
$ ssh pi@{IP_ADDRESS_OF_RASPBERRY_PI}
{IP_ADDRESS_OF_RASPBERRY_PI}는 라즈베리파이 터미널에서 ifconfig에서 확인할 수 있다.
3.2 라즈베리파이에서 카메라 동작
로보티즈e메뉴얼을 참조하여 라즈베리파이 카메라도 동작이 되는 것을 확인하였다.
참조링크:emanual.robotis.com/docs/en/platform/openmanipulator_x/ros_perceptions/

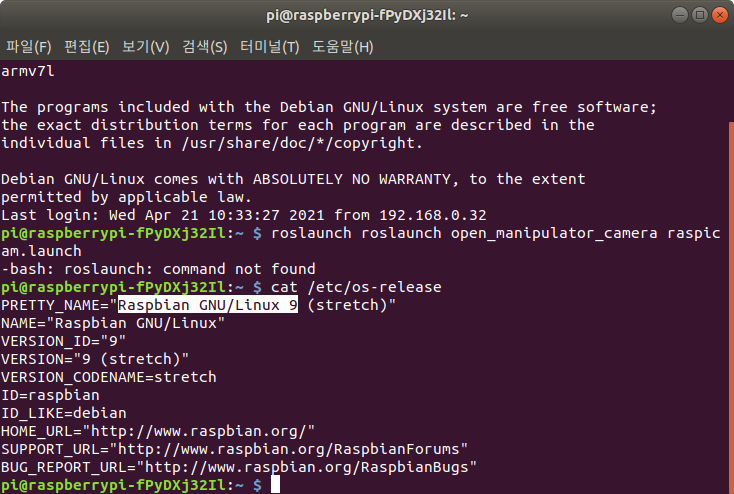
3.3 라즈베리파이에 ROS melodic 설치
문제발생
참조링크 : pinkwink.kr/1309 라즈베리파이에서 ros를 설치하는 과정 중 빌드과정에서 부하가 걸리는지 화면정지가 나타나고 한참있다가 재부팅이 진행되고 있다.
다시해보자..
여러번 시도 했을 때 같은 부분에서 더 진행되지 않아 다른방법을 찾았다.
다른방법)
라즈베리파이에 우분투설치 후 ros설치
노트북 개발환경과 같이 우분투18.04와 ROS melodic을 설치하려고 했는데 더이상 지원을 하지 않았다.
따라서 우분투20.04와 ROS noetic를 진행하기로 한다.
참조링크 : www.youtube.com/watch?v=zasvSKaobVI&t=29s
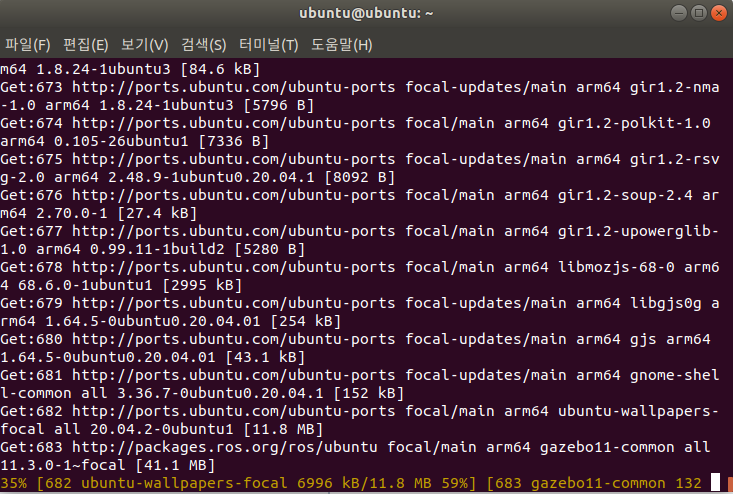
위 영상을 참고해 라즈베리파이3에 우분투20.04를 설치할 수 있었다.
또, 아래 영상을 참고해 라즈베리파이3에 ROS Noetic을 설치하였다.
참조링크 : www.youtube.com/watch?v=s-bSanf7VqM&t=80s
라즈베리파이 원격접속에서 roscore 실행
Error발생
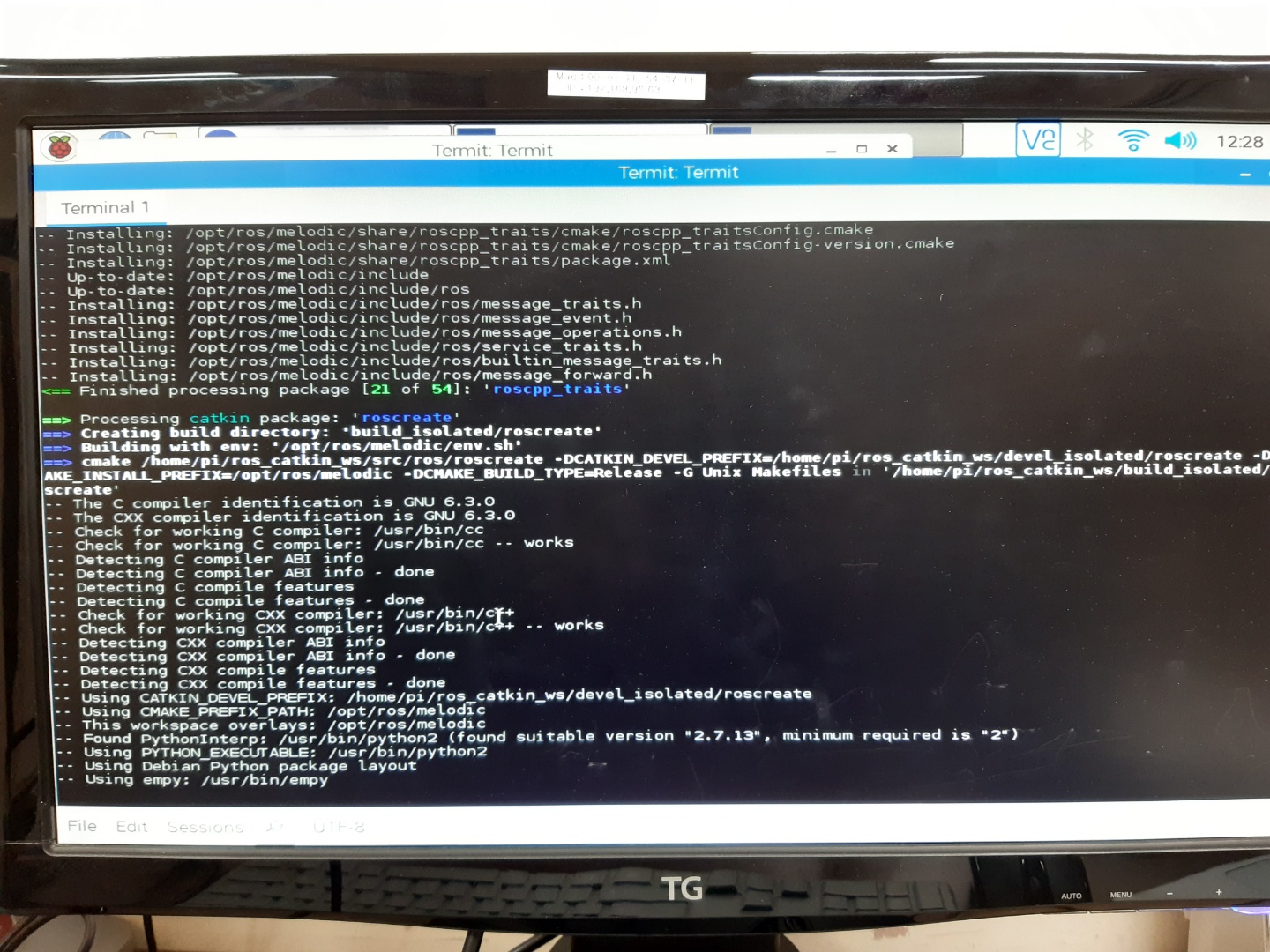
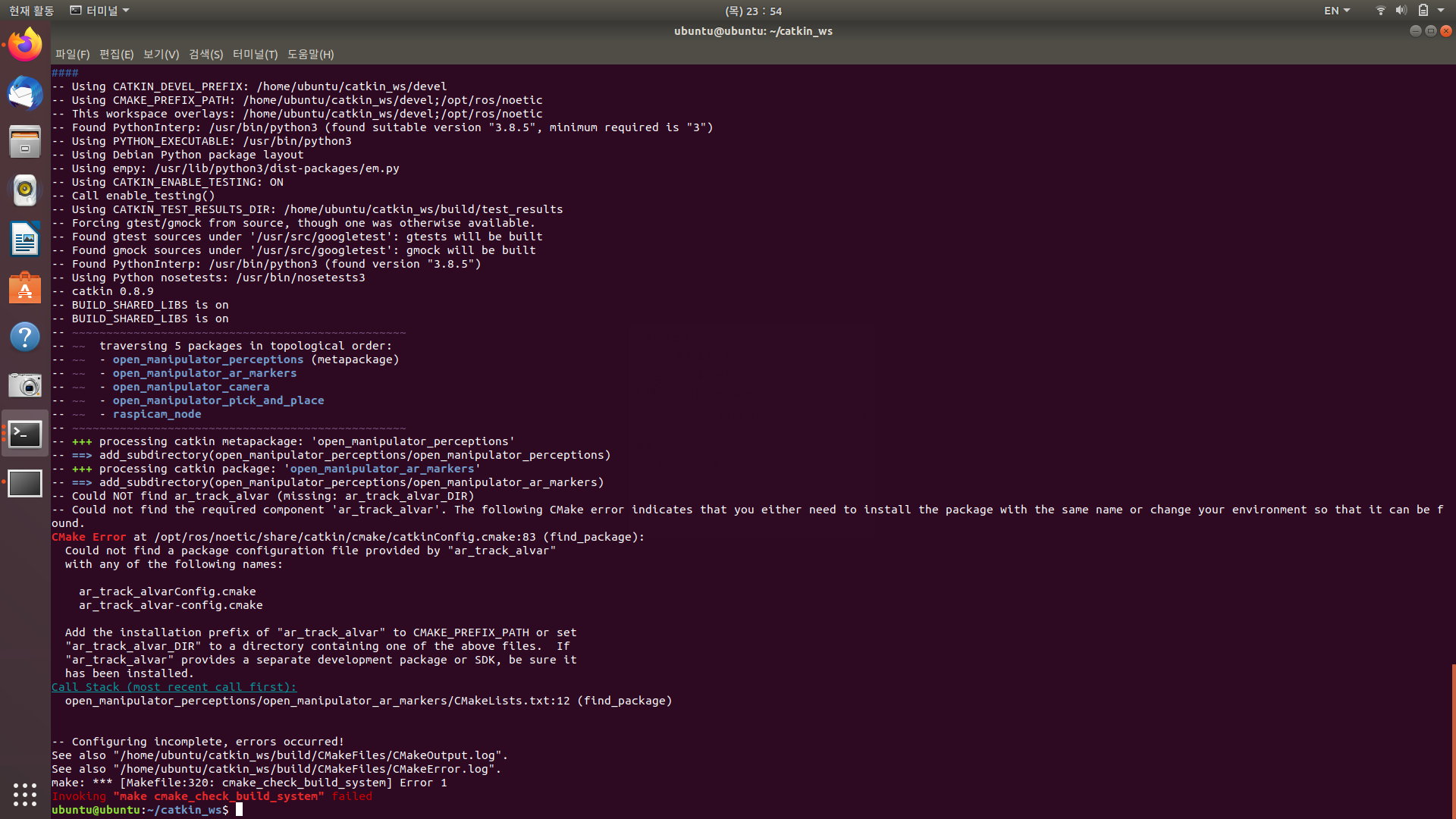
emanual.robotis.com/docs/en/platform/openmanipulator_x/ros_perceptions/ 글의 6번과정에서
catkin_make로 빌드를 진행하는 중 에러가 발생한다ㅜㅠㅜㅠㅜㅠ
+라즈베리파이 카메라 부착대

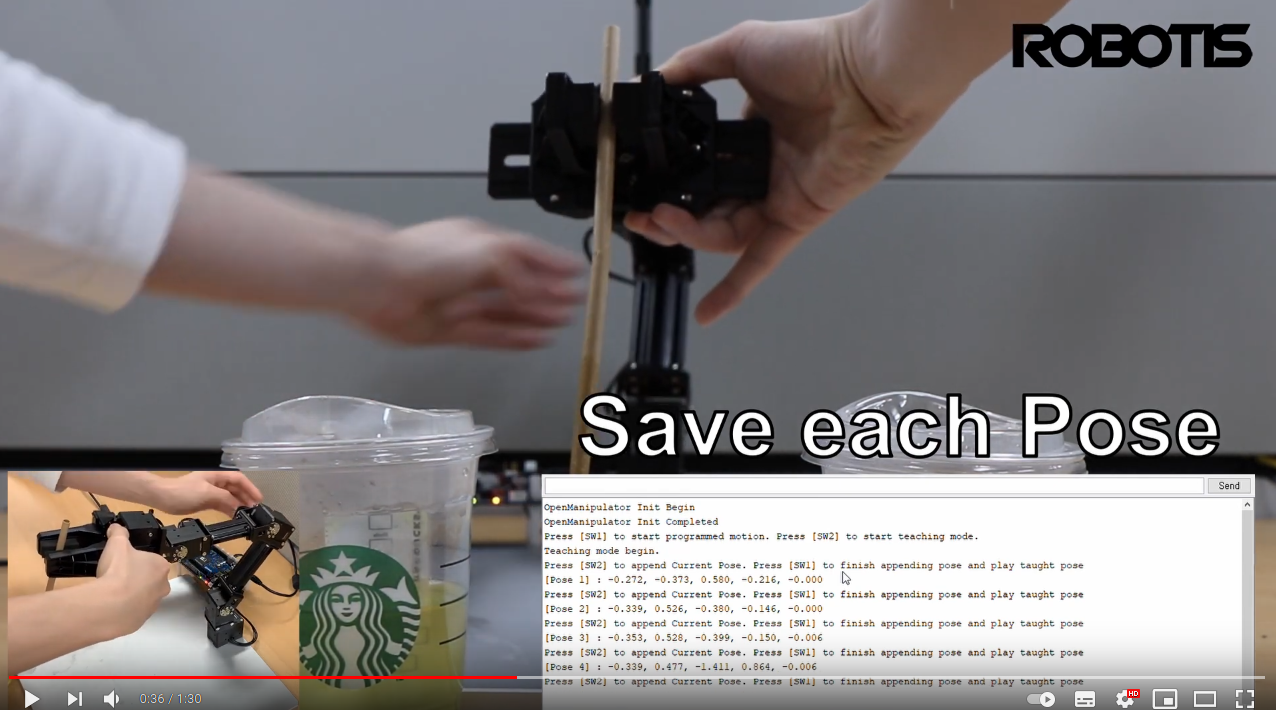
4. Openmanipulator Teaching(예정)
참조링크 : www.youtube.com/watch?v=t2xUWZYMw8Y
OpenCR만을 가지고 가볍게 진행할 수 있는 재밌는 영상이다.
바로 되진 않는다. 뭐지!?
참고)
Openmanipulator로 Tracking을 구현한 글이다.
카메라로 물체를 인식해 공간 좌표를 뽑아내고 이를 매니퓰레이터가 따라가는 형태이다.
대단하다....
[indistrial] 오픈 메니풀레이터로 물체 인식해서 따라가기 ( object tracking by open manipulator )
앞단에 시뮬레이션한 짭잇;;; 실물화 했습니다. 완벽하지 않지만 따라가긴 합니다. ㅋ어엉 감동......아 사과가 너무커서 잡진 못하고 tracking 만 ;ㅎㅎㅎ방금 영상찍...
cafe.naver.com
'기계공학부 시절의 기록 > Main Project Posting' 카테고리의 다른 글
| Operating OpenManipulator-X using Myo-armband in ROS1(melodic) 최종정리 (2) | 2021.11.13 |
|---|

댓글