개발환경 : ubuntu 20.04, ROS2 foxy
로보티즈홈페이지의 Dashing 버전의 이메뉴얼을 따라하였고, 아두이노 설치는 압축해제, 접근 권한 명령과 같은 설명이 필요해 블로그를 참고하였다.
https://emanual.robotis.com/docs/en/platform/openmanipulator_x/quick_start_guide/
https://ieworld.tistory.com/11
아래의 순서로 진행하였고 결과적으로 동작하지 않았다.
컨트롤러는 원인모를 이유로 자동종료되고 teleop노드는 불안정하게 화면이 계속 깜빡였다.
결과적으로 아직 foxy 버전은 지원하지 않는다는 답변을 받았다.
ROBOTIS
액츄에이터 기반 실내/외 자율주행로봇 및 서비스로봇 솔루션 전문 업체.
www.robotis.com
1. package download
이 때, dashing을 foxy로 바꾸어 진행하였다.
2. OpenCR port 연결 by arduino
3. 컨트롤러_launch파일, teleop_launch파일 각각 launch
$ ros2 launch open_manipulator_x_controller open_manipulator_x_controller.launch.py usb_port:=/dev/ttyACM0
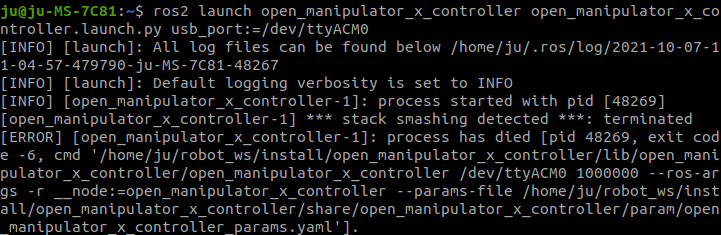
오류내용)
~$ ros2 launch open_manipulator_x_controller open_manipulator_x_controller.launch.py usb_port:=/dev/ttyACM0
[INFO] [launch]: All log files can be found below /home/ju/.ros/log/2021-10-07-11-04-57-479790-ju-MS-7C81-48267
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [open_manipulator_x_controller-1]: process started with pid [48269]
[open_manipulator_x_controller-1] *** stack smashing detected ***: terminated
[ERROR] [open_manipulator_x_controller-1]: process has died [pid 48269, exit code -6, cmd '/home/ju/robot_ws/install/open_manipulator_x_controller/lib/open_manipulator_x_controller/open_manipulator_x_controller /dev/ttyACM0 1000000 --ros-args -r __node:=open_manipulator_x_controller --params-file /home/ju/robot_ws/install/open_manipulator_x_controller/share/open_manipulator_x_controller/param/open_manipulator_x_controller_params.yaml'].
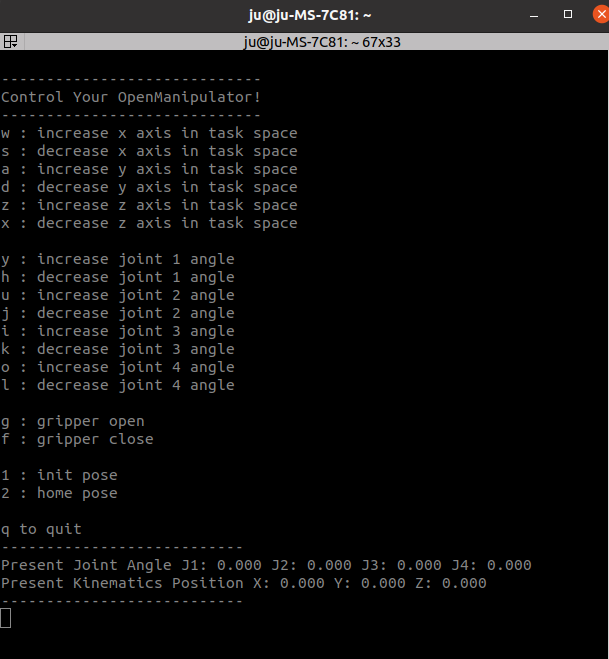
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_keyboard
잘동작하는 것 처럼 보이지만 실제로는 화면이 계속 깜빡이며 명령에 동작하지 않는다.
이는 컨트롤러가 동작하지 않기에 당연하다.
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| matlab install in Ubuntu 18.04 & communication with ROS (0) | 2021.10.13 |
|---|---|
| (진행중)OpenManipulator teleop 코드분석 (0) | 2021.10.12 |
| 21/10/05 IRaC Lab 방문 (2) | 2021.10.05 |
| [진행중]10월 1째주. ROS 진행상황 (0) | 2021.10.01 |
| 9월 4째주. ROS 진행상황 (0) | 2021.09.30 |




댓글