728x90
반응형
1. make package
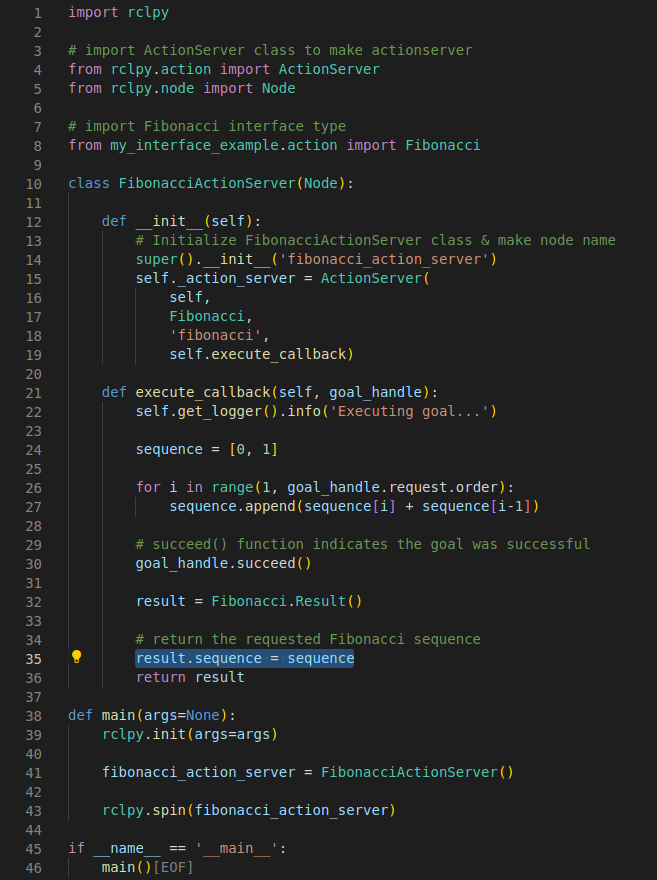
2. make python file
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
import rclpy
# import ActionServer class to make actionserver
from rclpy.action import ActionServer
from rclpy.node import Node
# import Fibonacci interface type
from my_interface_example.action import Fibonacci
class FibonacciActionServer(Node):
def __init__(self):
# Initialize FibonacciActionServer class & make node name
super().__init__('fibonacci_action_server')
self._action_server = ActionServer(
self,
Fibonacci,
'fibonacci',
self.execute_callback)
def execute_callback(self, goal_handle):
self.get_logger().info('Executing goal...')
sequence = [0, 1]
for i in range(1, goal_handle.request.order):
sequence.append(sequence[i] + sequence[i-1])
# succeed() function indicates the goal was successful
goal_handle.succeed()
result = Fibonacci.Result()
# return the requested Fibonacci sequence
result.sequence = sequence
return result
def main(args=None):
rclpy.init(args=args)
fibonacci_action_server = FibonacciActionServer()
rclpy.spin(fibonacci_action_server)
if __name__ == '__main__':
main()
|
cs |

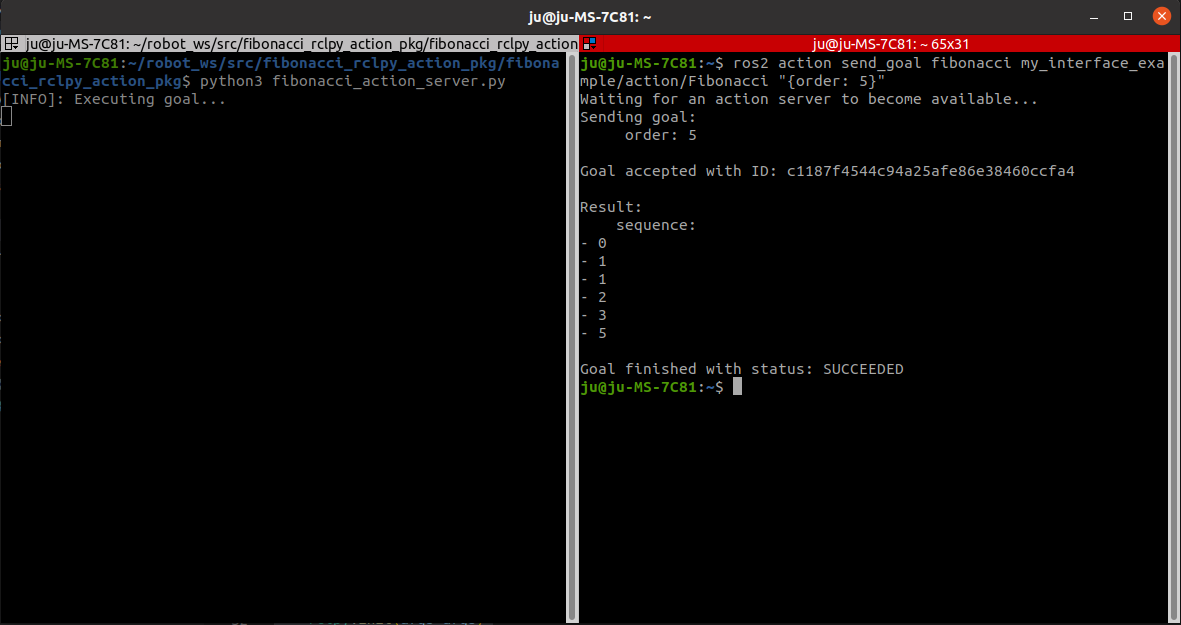
3. play
python은 인터프리터 언어로 빌드가 필요없다.
현재까지의 코드는 피드백이 없는 상태
피드백을 위해서는 코드를 수정해야 한다.
4. add the feedback
[revise code]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
|
import time
import rclpy
# import ActionServer class to make actionserver
from rclpy.action import ActionServer
from rclpy.node import Node
# import Fibonacci interface type
from my_interface_example.action import Fibonacci
class FibonacciActionServer(Node):
def __init__(self):
# Initialize FibonacciActionServer class & make node name
super().__init__('fibonacci_action_server')
self._action_server = ActionServer(
self,
Fibonacci,
'fibonacci',
self.execute_callback)
def execute_callback(self, goal_handle):
self.get_logger().info('Executing goal...')
# Define the feedback
feedback_msg = Fibonacci.Feedback()
feedback_msg.partial_sequence = [0, 1]
for i in range(1, goal_handle.request.order):
feedback_msg.partial_sequence.append(
feedback_msg.partial_sequence[i] + feedback_msg.partial_sequence[i-1])
self.get_logger().info('Feedback: {0}'.format(feedback_msg.partial_sequence))
# publish Feedback msg
goal_handle.publish_feedback(feedback_msg)
time.sleep(1)
# succeed() function indicates the goal was successful
goal_handle.succeed()
result = Fibonacci.Result()
# return the requested Fibonacci sequence
result.sequence = feedback_msg.partial_sequence
return result
def main(args=None):
rclpy.init(args=args)
fibonacci_action_server = FibonacciActionServer()
rclpy.spin(fibonacci_action_server)
if __name__ == '__main__':
main()
|
cs |
5. play

next time we will add action client code
728x90
반응형
'기계공학부 시절의 기록 > ROS2 Study' 카테고리의 다른 글
| 11 week HW (2) Parameter programming (0) | 2021.11.16 |
|---|---|
| 11 week HW (1) action programming : action client node (0) | 2021.11.14 |
| 10 week HM (2) : create action interface (0) | 2021.11.09 |
| 10 week HM (1) service programming (0) | 2021.11.09 |
| 8week ROS homework : Simple node code explain (0) | 2021.10.25 |




댓글