review
https://needs-searcher.tistory.com/181
6 week HW Parameter control using turtlesim node
Experiment of ROS2 parameter, RQt, and ROS2 package installation 1. parameter 2. ROS2 tools - Command Line Tools https://github.com/ubuntu-robotics/ros2_cheats_sheet/blob/master/cli/cli_cheats_shee..
needs-searcher.tistory.com
command list
see a list of parma
$ ros2 param list
get value of a param
$ ros2 param get <node_name> <parameter_name>
set value
$ ros2 param set <node_name> <parameter_name> <value>
1. make a package
$ ros2 pkg create python_parameters --build-type ament_python --dependencies rclpy
2. write code
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
|
import rclpy
from rclpy.node import Node
from rclpy.exceptions import ParameterNotDeclaredException
class MinimalParam(Node):
def __init__(self):
super().__init__('minimal_param_node')
timer_period = 2 # every 2 sec
# to call callback func at custum hertz
self.timer = self.create_timer(timer_period, self.timer_callback)
self.declare_parameter('my_parameter', 'world') # param name, param value
def timer_callback(self):
# first, get param from the node and assign value to my_param
my_param = self.get_parameter('my_parameter').get_parameter_value().string_value
self.get_logger().info('Hello %s!' % my_param)
def main():
rclpy.init()
node = MinimalParam()
try:
rclpy.spin(node)
except KeyboardInterrupt:
node.get_logger().info('This node is finished by keboard interrupt')
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
|
cs |
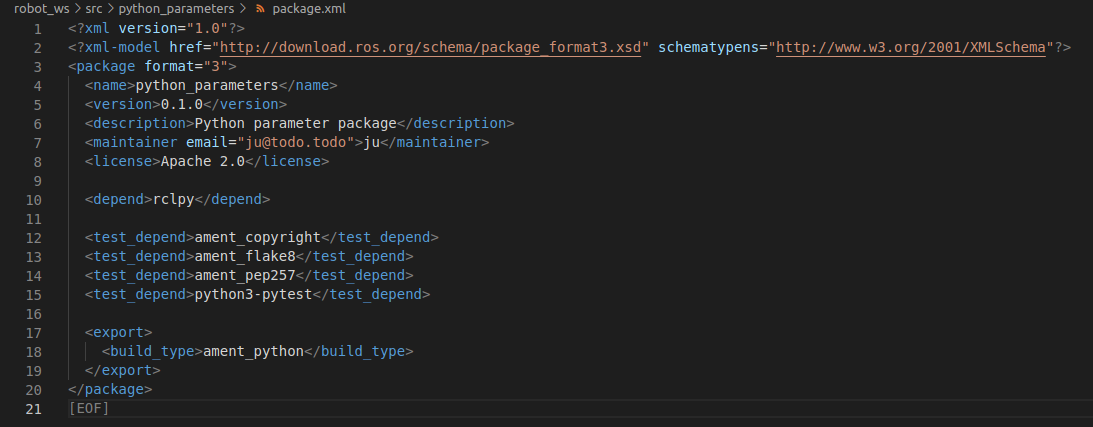
3. revise package.xml file
4. revise the setup.py file
** entry_point**

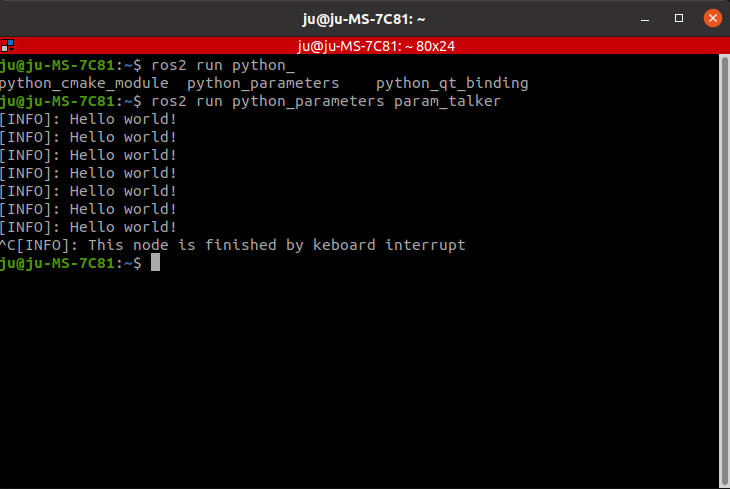
note that the node's executable name is 'param_talker'
5. build and run
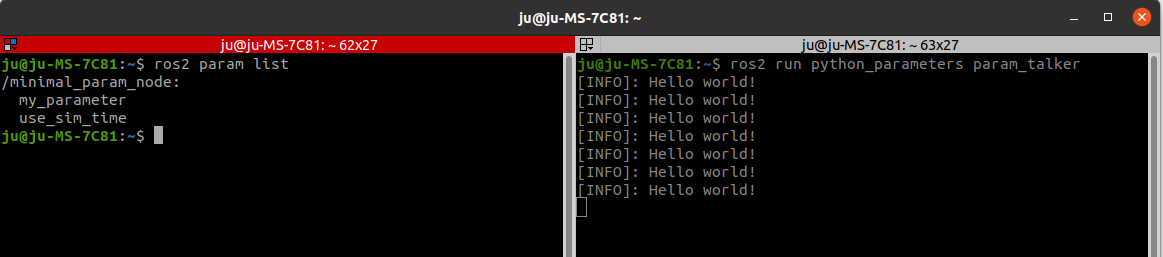
6. check the created parameter
see a list of parma
$ ros2 param list
get value of a param
$ ros2 param get <node_name> <parameter_name>

set value
$ ros2 param set <node_name> <parameter_name> <value>

7. Add a parameter
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
import rclpy
from rclpy.node import Node
from rclpy.exceptions import ParameterNotDeclaredException
class MinimalParam(Node):
def __init__(self):
super().__init__('minimal_param_node')
timer_period = 2
# to call callback func at custum hertz
self.timer = self.create_timer(timer_period, self.timer_callback)
self.declare_parameter('my_parameter', 'world') # param name, param value
self.declare_parameter('num_parameter', 1) # another param
def timer_callback(self):
# first, get param from the node and assign value to my_param
my_param = self.get_parameter('my_parameter').get_parameter_value().string_value
num_param = self.get_parameter('num_parameter').get_parameter_value().integer_value
self.get_logger().info('Hello %s!, Num: %d,' % (my_param, num_param))
def main():
rclpy.init()
node = MinimalParam()
try:
rclpy.spin(node)
except KeyboardInterrupt:
node.get_logger().info('This node is finished by keboard interrupt')
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
|
cs |
add two lines
self.declare_parameter('num_parameter', 1)
self.get_logger().info('Hello %s!, Num: %d,' % (my_param, num_param))
8. test

9. check in rqt and revise the param value
at rqt - Plugins-Configuration-Dynamic reconfigure

'기계공학부 시절의 기록 > ROS2 Study' 카테고리의 다른 글
| 11 week HW (3) Command line argument (0) | 2021.11.16 |
|---|---|
| 11 week HW (1) action programming : action client node (0) | 2021.11.14 |
| 10 week HW (3) action programming : action server node (0) | 2021.11.09 |
| 10 week HM (2) : create action interface (0) | 2021.11.09 |
| 10 week HM (1) service programming (0) | 2021.11.09 |




댓글