728x90
반응형
도움이 된 글
https://cafe.naver.com/openrt/18408
ros에서 pub되는 msg가 배열인데 이거 통째로 어떻게 sub받나요???
질문양식[개발환경] (옵션)1) 운영체제 :우분투 16, 로스 키네틱2) 보드이름 : 3) 컴파일러 : C++4) 버전정보 : 5) 참고강좌 : [현재상황] (필수)1) 목적...
cafe.naver.com
1. 어떤 데이터를 통신하는지 다시 확인
2. 해당토픽이 어떤 형식의 데이터를 쓰는지 확인

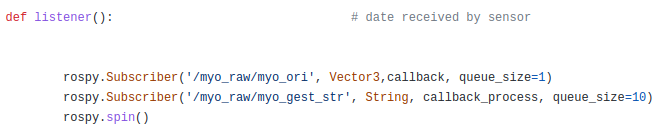
3. cpp 파일에서
1) subscriber 구현함수아래에 myo_ori데이터 받을 sub 만들 코드 추가
myo_imu_sub_ = node_handle_.subscribe("토픽명", 큐사이즈, &클래스명::콜백함수명, this);
2) 콜백함수 구현
void 클래스명::콜백함수(const 인터페이스명::세부인터페이스::ConstPtr &msg)
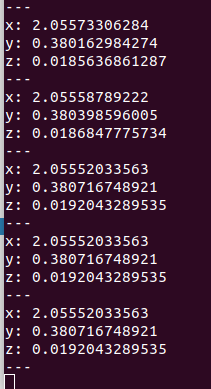
그 안에는 그 값들을 노드 터미널에 출력하려고 아래와 같이 ROS_INFO로 적었는데 생각처럼 구현되진 않았다.

4. 헤더파일에서
1) 해당 인터페이스 include하기
#include <geometry_msgs/Vector3.h>
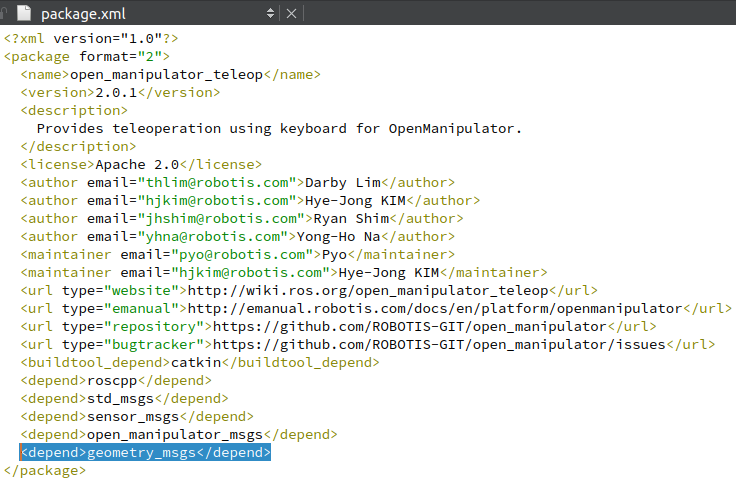
2) 패키지에 해당 인터페이스 depend 추가
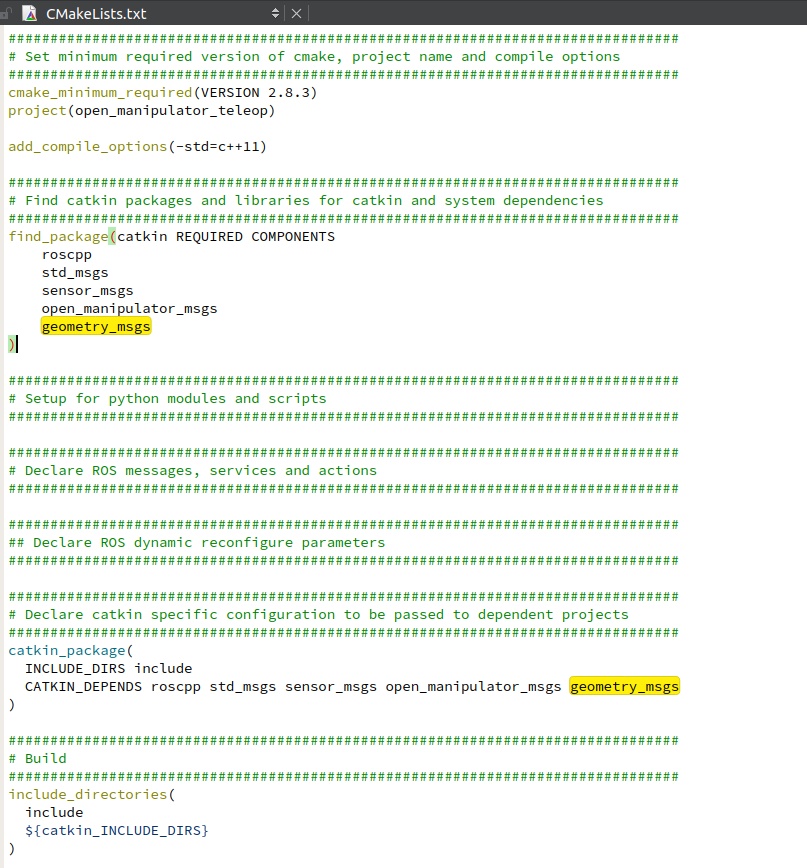
3) CMakeLists.txt에 해당 인터페이스 관련 추가
5. catkin_ws 위치에서 빌드
$ cd ~/catkin_ws && catkin_make
6. rqt로 확인
/myo_raw에서 /teleop_keyboard로 /myo_raw/myo_ori 토픽을 통해 연결된 것을 확인할 수 있다.

728x90
반응형
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| 명령어모음 및 1차 수정코드(open_manipulator_teleop_keyboard) (0) | 2021.10.27 |
|---|---|
| open_manipulator_teleop.cpp 코드수정을 위한 코드공부(ros::spin, 클래스 접근지정, vector, 포인터) (0) | 2021.10.27 |
| 이기종간 ROS통신(matlab과 ROS 연결) (0) | 2021.10.14 |
| matlab install in Ubuntu 18.04 & communication with ROS (0) | 2021.10.13 |
| (진행중)OpenManipulator teleop 코드분석 (0) | 2021.10.12 |


댓글