728x90
반응형
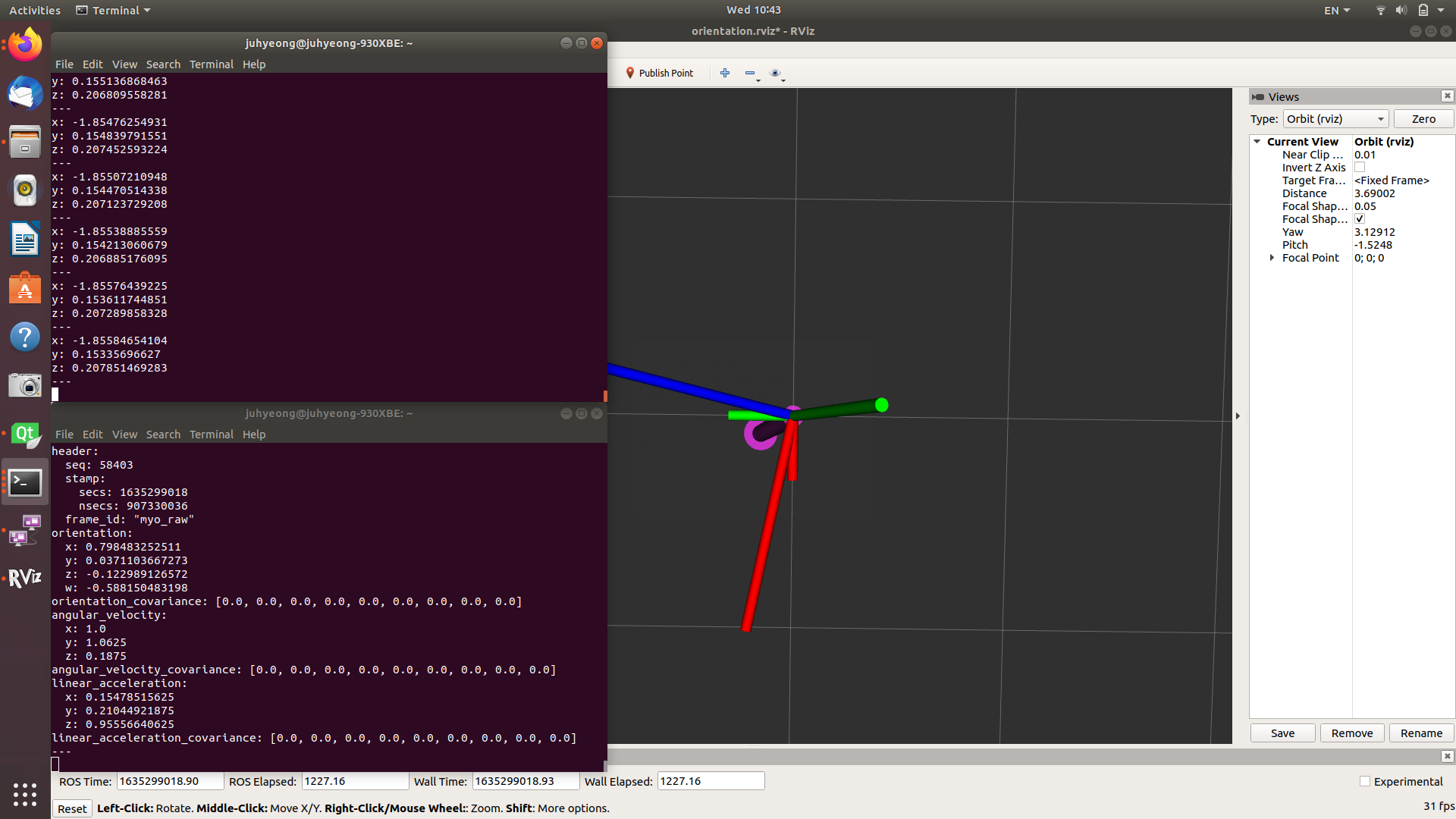
코드상에서는 roll, pitch, yaw값을 의미한다고 되어있다. 축의 회전값? 회전된 값을 어떻게 나타낸 것일까. 더 자세히 실험을 통해 어떤 데이터인지 확인해보았다. 그 결과 특정 위치에서의 myo 기준축(roll = 0, pitch = 0, yaw = 0)으로 두고 회전각을 나타내었다.
또, 이 기준축은 센서를 새롭게 킬 때마다 조금씩 달라짐을 확인하였다. 따라서 똑같은 동작을 하고 있더라도 myo를 킬 때마다 myo에서 보내는 orientation값은 달라진다.
[팔 정면방향으로 뻗음] x = y = z = 0


[오른쪽으로] x (roll값)가증가


[왼쪽으로] x(roll값) 감소

[아래쪽으로] y(pitch값) 증가


이를 바탕으로 myo의 어떤 움직임에 myo_ori값이 어떻게 변하는지 정리하였다.

728x90
반응형
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| Myo로 OpenManipulator 동작시키기 성공!!! (1) | 2021.10.28 |
|---|---|
| 또다시 포트연결문제 발생 : ttyACM0 -> ttyACM1 (0) | 2021.10.27 |
| 명령어모음 및 1차 수정코드(open_manipulator_teleop_keyboard) (0) | 2021.10.27 |
| open_manipulator_teleop.cpp 코드수정을 위한 코드공부(ros::spin, 클래스 접근지정, vector, 포인터) (0) | 2021.10.27 |
| myo와 teleop 사이의 Topic 통신 확인 (0) | 2021.10.25 |


댓글