728x90
반응형
로봇팔의 끝점을 나타낼 때 좌표와 링크의 방향을 나타내어야 하는데
베이스 링크의 기준좌표에서 봤을 때 끝점의 방향은 각 링크간의 회전관계를 나타낸 회전행렬의 곱으로 구할 수 있다.
이번 장에서 회전행렬을 구하는 방법과 성질, 쓰임에 대해서 공부한다.
회전행렬

{s} 기준좌표에서 {b}좌표를 바라봤을 때, s에 대한 b로의 회전행렬 R은 위처럼 구할 수 있다.
(R_sb: the orientation of frame b in frame s coordinates. : s좌표에서 본 b좌표 방향)
공간상에서 강체는 3개의 방향좌표를 가지는데
회전행렬은 9개의 요소를 가진다. 때문에 6개의 제약조건(constraints)를 가져야 하는데
3개 벡터가 모두 단위행렬이어야하고
3개 벡터가 서로 모두 직교(orthogonal)해야한다.
이를 하나의 식으로 표현하면 R'R=I로 표현할 수 있다.
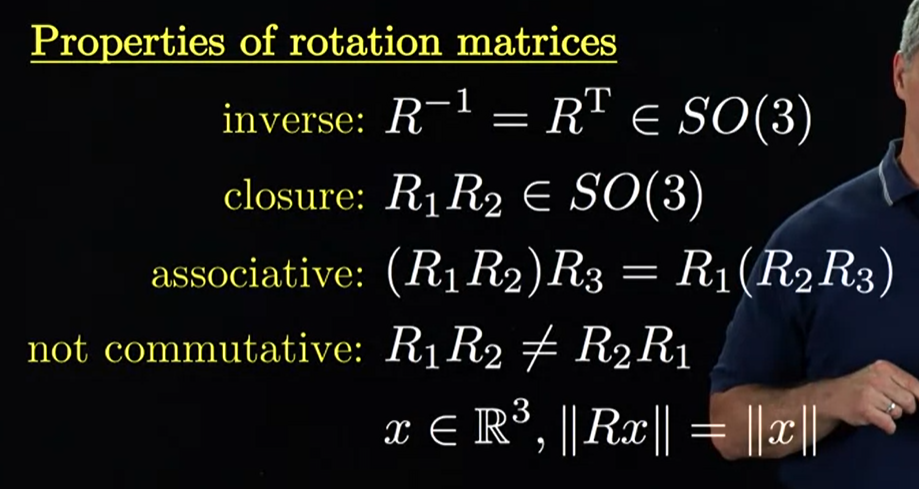
회전행렬의 성질
회전행렬의 쓰임



728x90
반응형
'기계공학부 시절의 기록 > 로보틱스' 카테고리의 다른 글
| 로봇 관절의 회전 표현방법 2가지 : 회전행렬, w세타 (0) | 2021.01.09 |
|---|---|
| 각속도 (0) | 2021.01.09 |
| MR 2.3-2.5 Configuration space(로봇의 상태 표현) (0) | 2021.01.05 |
| 코세라-Modern Robotics (0) | 2021.01.04 |
| 대구로봇아이디어 공모전 참가후기(ROBEX구경, 현대로보틱스, 삼익THK, 한국전기연구원) (0) | 2020.11.25 |




댓글