로봇팔은 조인트와 링크로 연결되어 있다.
인접한 링크간의 회전관계를 구하고
첫번째 기반 링크로부터 끝점 링크의 회전각을 구할 수 있었다.
MR 3.1~3.2 : 회전행렬
로봇팔의 끝점을 나타낼 때 좌표와 링크의 방향을 나타내어야 하는데 베이스 링크의 기준좌표에서 봤을 때 끝점의 방향은 각 링크간의 회전관계를 나타낸 회전행렬의 곱으로 구할 수 있다. 이
needs-searcher.tistory.com
그렇다면 인접한 링크간의 속도관계를 구하고 첫번째 기반 링크로부터 끝점 링크의 회전속도관계 역시 구할 수 있을 것이다.
즉, R_sb를 구했다면 R_sb돗을 어떻게 구하는지 알아본다.

먼저, 기준링크에 부착된 {s}좌표가 있고 기준링크와 조인트로 연결된 링크에 {b}좌표가 부착되어 있다.
b좌표가 s좌표에서 바라봤을 때 각속도(크기, 방향)를 w_s라고 한다.
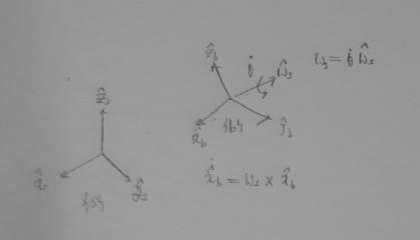
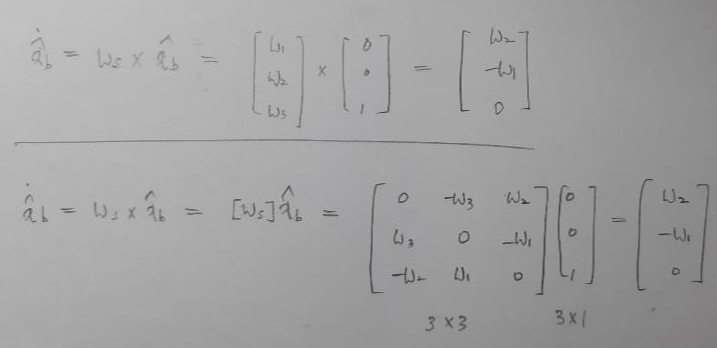
b좌표의 x,y,z축의 속도는 w_s와 축의 외적으로 구할 수 있다.

이 때, 외적을 내적으로 바꿀 수 있게 하기 위해 하나의 테크닉이 들어온다.

이를 간단히 직접 예를 들어 계산해보면
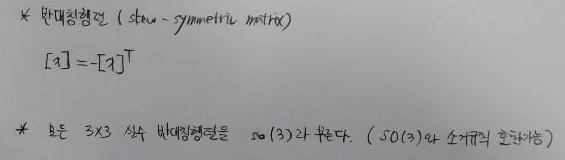
반대칭행렬 - Google 검색
2020. 5. 5. · 8.3 대칭행렬, 반대칭행렬, 직교행렬(Symmetric, Skew-Symmetric, and Orthogonal Matrices) Symmetric matrix는 , Skew-symmetric matrix는 , ...
www.google.com
결론적으로 아래와 같다. 이를 so(3)으로 표현한 각속도라고 한다.
이를 바탕으로 자유자재로 s좌표에서 바라본 각속도를 b좌표에서 바라본 각속도로 변환하거나 할 수 있다.

출처
www.coursera.org/learn/modernrobotics-course1/lecture/TWy0g/angular-velocities-chapter-3-2-2
Angular Velocities (Chapter 3.2.2) - Chapter 3: Rigid-Body Motions (Part 1 of 2) | Coursera
Video created by 노스웨스턴 대학교 for the course "Modern Robotics, Course 1: Foundations of Robot Motion". Rigid-body motions, rotation matrices, angular velocities, and exponential coordinates of rotation.
www.coursera.org
'기계공학부 시절의 기록 > 로보틱스' 카테고리의 다른 글
| 강체의 위치와 속도, 힘 표현 : T matrix, twist, screw, wrench (0) | 2021.01.12 |
|---|---|
| 로봇 관절의 회전 표현방법 2가지 : 회전행렬, w세타 (0) | 2021.01.09 |
| MR 3.1~3.2 : 회전행렬 (0) | 2021.01.07 |
| MR 2.3-2.5 Configuration space(로봇의 상태 표현) (0) | 2021.01.05 |
| 코세라-Modern Robotics (0) | 2021.01.04 |




댓글