#1 Create Topic msg
1. Write code
[helloworld_publisher.py]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
|
import rclpy
# Node class import. In Node classm, there are create_publisher(), create_timer(), get_logger() and so on.
from rclpy.node import Node
from rclpy.node import QoSProfile
# msg type import
from std_msgs.msg import String
# Create class and inherit Node class
class HelloworldPublihser(Node):
# Initializer(Constructor)
def __init__(self):
# calls the Node class's constructor and make node name
super().__init__('helloworld_publisher')
qos_profile = QoSProfile(depth=10)
# make publisher
self.helloworld_publisher = self.create_publisher(String, 'helloworld', qos_profile)
# call callback func. every 1 sec
self.timer = self.create_timer(1, self.publish_helloworld_msg)
self.count = 0
# Define callback func.
def publish_helloworld_msg(self):
# call String class and assign to msg variable
msg = String()
# Define msg data using data property which is from String class
msg.data = 'Helloworld: {0}'.format(self.count)
# Actually publish : push on Topic
self.helloworld_publisher.publish(msg)
# Print on terminal
self.get_logger().info('Published message: {0}'.format(msg.data))
self.count += 1
def main(args=None):
# rclpy initialize
rclpy.init(args=args)
# node : instance of HelloworldPublihser class
node = HelloworldPublihser()
# play the node. class. and its mean playing callback func.
rclpy.spin(node)
# close the node
node.destroy_node()
rclpy.shutdown()
'''
try:
rclpy.spin(node)
except KeyboardInterrupt:
node.get_logger().info('Keyboard Interupt (SIGINT)')
finally:
node.destroy_node()
rclpy.shutdown()
'''
if __name__ == '__main__':
main()
|
cs |
[helloworld_subscriber.py]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
|
import rclpy
# import Node class
from rclpy.node import Node
from rclpy.node import QoSProfile
# import String msg type class
from std_msgs.msg import String
# Create HelloworldSubscriber Class, and inherit Node class
class HelloworldSubscriber(Node):
def __init__(self):
# calls the Node class's constructor and make node name
super().__init__('Helloworld_subscriber')
qos_profile = QoSProfile(depth=10)
# Define subscribe node
self.Helloworld_subscriber = self.create_subscription(
String,
'helloworld',
self.subscribe_topic_message,
qos_profile)
# Define callback func.
# msg is defined in helloworld_publisher.py
def subscribe_topic_message(self, msg):
# print on terminal
self.get_logger().info('Received message: {0}'.format(msg.data))
def main(args=None):
# Initailize rclpy
rclpy.init(args=args)
# Instance of HelloworldSubscriber class
node = HelloworldSubscriber()
# play the node(HelloworldSubscriber class), its mean playing callbackfunc.
rclpy.spin(node)
# close the node
node.destroy_node()
rclpy.shutdown()
'''
try:
rclpy.spin(node)
except KeyboardInterrupt:
node.get_logger().info('Keyboard Interrupt (SIGINT)')
finally:
node.destroy_node()
rclpy.shutdown()
'''
if __name__ == '__main__':
main()
|
cs |
package.xml and setup.py 은 이전 포스팅(7주차 과제)에서 처럼 dependencies파일을 추가하여 수정하여야 한다.
2. bashrc
$ code ~/.bashrc
아래의 코드를 추가하여 환경설정파일을 매번 새로운 터미널 창을 열때마다 자동으로 불러오게끔 한다.

3. hello robot.com
아래 홈페이지에서 집안일을 거드는 로봇을 볼 수 있다.

Hello Robot : Simply Useful Robots
Provider of the Stretch Research Edition. Remarkable for its capability, portability. We've reimagined the mobile manipulator.
hello-robot.com
#2 Create Srv Programming
[sum_service.py]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
|
import rclpy
# import Node class
from rclpy.node import Node
# import AddTwoInts srv type class
from example_interfaces.srv import AddTwoInts
# Define class and inherit Node class to use Node class's func.s
class SumServiceAsync(Node):
# Initializer(Constructor)
def __init__(self):
# calls the Node class's constructor and make node name
super().__init__('sum_service')
# Define srv.
self.srv = self.create_service(AddTwoInts, 'add_two_ints', self.add_two_ints_callback)
# Define callback func.
def add_two_ints_callback(self, request, response):
# Define variable
response.sum = request.a + request.b
self.get_logger().info('Incoming request\na: %d b: %d' % (request.a, request.b))
return response
def main(args=None):
rclpy.init(args=args)
sum_service = SumServiceAsync()
try:
rclpy.spin(sum_service)
except KeyboardInterrupt:
sum_service.get_logger().info('This node is finished by keboard interrupt')
finally:
sum_service.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
|
cs |
[sum_client.py]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
|
import sys
import rclpy
# import Node class
from rclpy.node import Node
# import srv type class
from example_interfaces.srv import AddTwoInts
# Define SumClientAsync class
class SumClientAsync(Node):
def __init__(self):
super().__init__('sum_client_async')
# Define client
self.cli = self.create_client(AddTwoInts, 'add_two_ints')
# waiting for service getting ready
while not self.cli.wait_for_service(timeout_sec=1.0):
self.get_logger().info(
'service not available, waiting again...')
# req variable declare : Request func. of AddTwoInts class
self.req = AddTwoInts.Request()
def send_request(self):
# get command line input arg for the request
self.req.a = int(sys.argv[1])
self.req.b = int(sys.argv[2])
# make a srv request and asynchronously get the result
self.future = self.cli.call_async(self.req)
def main(args=None):
rclpy.init(args=args)
# make instance of class
sum_client = SumClientAsync()
sum_client.send_request()
while rclpy.ok():
# excute the instance
rclpy.spin_once(sum_client)
# if srv request done
if sum_client.future.done():
try:
# get result and assign to variable
response = sum_client.future.result()
except Exception as e:
sum_client.get_logger().info(
'Service call failed %r' %(e,))
else:
sum_client.get_logger().info(
'Result of add_two_ints: for %d + %d = %d' % (sum_client.req.a, sum_client.req.b, response.sum))
break
sum_client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
|
cs |
이렇게 source code를 만든 뒤에 빌드를 통해 필요한 의존성패키지를 준비하기 위해 package.xml, CMakeLists.txt파일을 수정하여야 한다.
[package.xml]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>sum_rclpy_srvcli_pkg</name>
<version>0.1.0</version>
<description>ROS2 rclpy service client package for sum</description>
<maintainer email="jh03130@gmail.com">ju</maintainer>
<license>Apache license 2.0</license>
<depend>rclpy</depend>
<depend>example_interfaces</depend>
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>
|
cs |
[setup.py]
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
|
from setuptools import setup
package_name = 'sum_rclpy_srvcli_pkg'
setup(
name=package_name,
version='0.1.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ju',
maintainer_email='jh03130@gmail.com',
description='ROS2 rclpy service client package for sum',
license='Apache License 2.0',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'sum_service = sum_rclpy_srvcli_pkg.sum_service:main',
'sum_client = sum_rclpy_srvcli_pkg.sum_client:main',
],
},
)
|
cs |
#3 Msg, srv interface making
보통 이미 만들어져 있는 일반적인 인터페이스를 사용할 수도 있지만 사용자에 맞게 새로운 인터페이스를 만들 수 있다. 먼저 패키지를 만들고 package.xml, CMakeLists.txt파일을 만들어줘야 한다.
1. Create pkg for interface
$ cd ~/robot_ws/src
$ ros2 pkg create my_interface_example --build-type ament_cmake
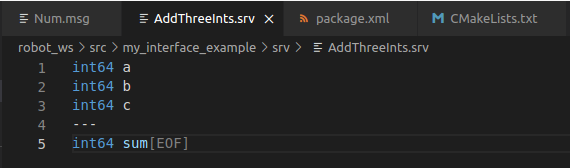
2. Write msg, srv code
$ cd ~/robot_ws/src/my_interface_example
$ mkdir msg srv
$ cd msg
$ touch msg/Num.msg

$ cd ~/robot_ws/src/my_interface_example/srv
$ touch AddThreeInts.srv
3. Revise a package.xml
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>my_interface_example</name>
<version>0.1.0</version>
<description>Msg and srv interface example</description>
<maintainer email="jh03130@gmail.com">ju</maintainer>
<license>Apache 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<build_depend>rosidl_default_generators</build_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
|
cs |
added 3 codes
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
3. Revise a CMakeLists.txt
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
|
cmake_minimum_required(VERSION 3.5)
project(my_interface_example)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# added codes
# find_package(<dependency> REQUIRED)
# need to convert at languages
# below code will make python file or header file to python or cpp language
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Num.msg"
"srv/AddThreeInts.srv"
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# uncomment the line when a copyright and license is not present in all source files
#set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# uncomment the line when this package is not in a git repo
#set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
|
cs |
added codes : make header files automatically
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Num.msg"
"srv/AddThreeInts.srv"
)
4. check header files (after build)
cd ~/robot_ws/install/my_interface_example/include/my_interface_example/srv or msg


5. check the created interface

'기계공학부 시절의 기록 > ROS2 Study' 카테고리의 다른 글
| 10 week HM (2) : create action interface (0) | 2021.11.09 |
|---|---|
| 10 week HM (1) service programming (0) | 2021.11.09 |
| ROS homework week7 (0) | 2021.10.18 |
| 6 week HW Parameter control using turtlesim node (0) | 2021.10.12 |
| ROS2 course week5. homework (0) | 2021.10.06 |




댓글