728x90
반응형
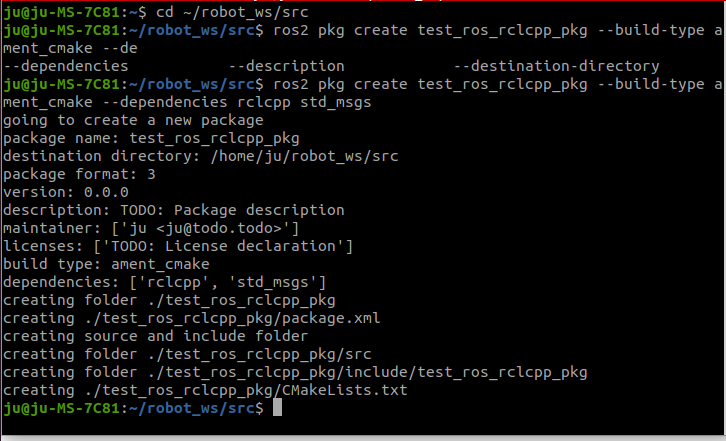
1. Create Package
[for cpp]
[for python]

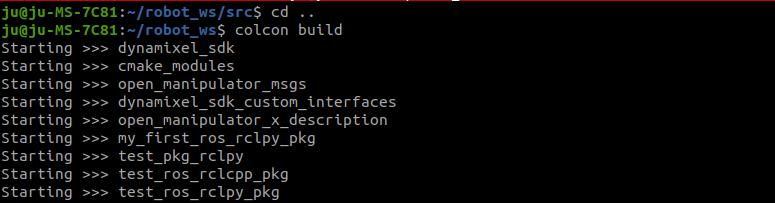
2. Build Package


3. Dependencies Problem Solving
$ sudo rosdep init
$ rosdep update
$ rosdep install -i from-path src --rosdistro foxy -y
$ rosdep install -i from-path sr --ignore-src --rosdistro foxy -y --skip-keys


ROS2 package files
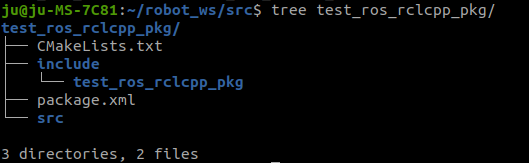
1. for cpp
package.xml
CmakeList.txt
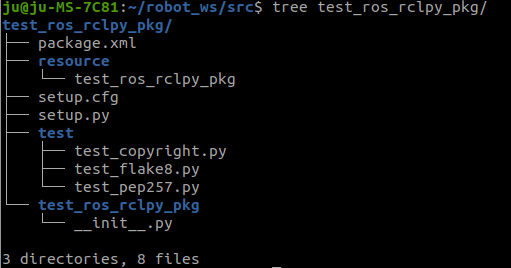
2. for python
package.xml
setup.py
essential
optional
only python
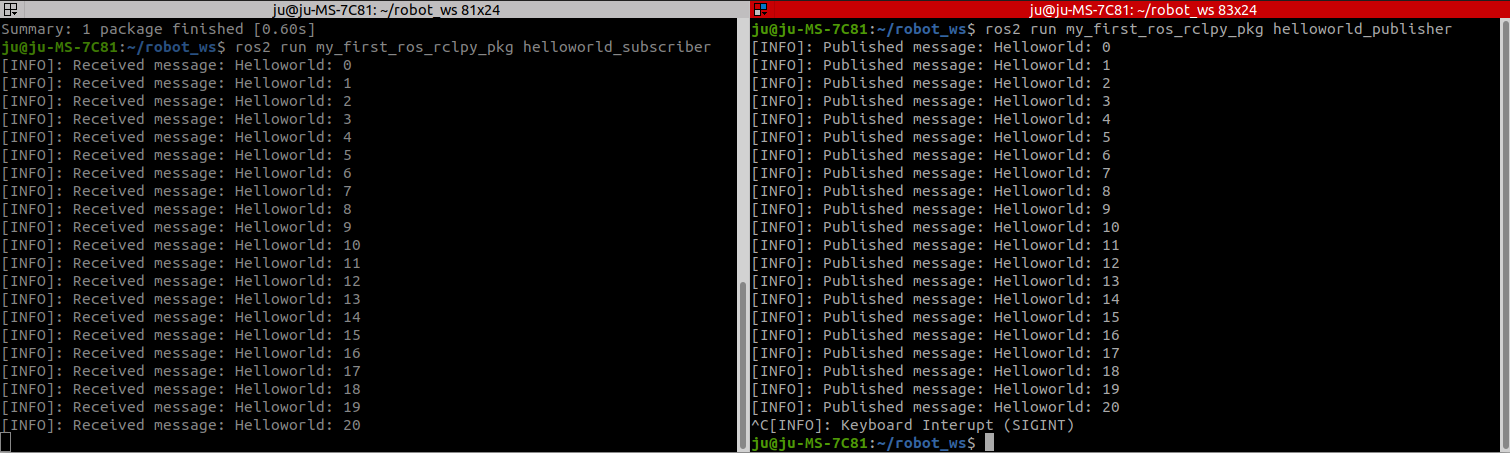
$ . install/setup.bash
$ ros2 run my_first_ros_rclpy_pkg helloworld_subscriber


728x90
반응형
'기계공학부 시절의 기록 > ROS2 Study' 카테고리의 다른 글
| 10 week HM (1) service programming (0) | 2021.11.09 |
|---|---|
| 8week ROS homework : Simple node code explain (0) | 2021.10.25 |
| 6 week HW Parameter control using turtlesim node (0) | 2021.10.12 |
| ROS2 course week5. homework (0) | 2021.10.06 |
| ROS2 course week4. homework (0) | 2021.10.06 |




댓글