1. service call
$ ros2 run turtlesim
$ ros2 run turtlesim turtle_teleop_key

$ ros2 service call /clear std_srvs/srv/Empty
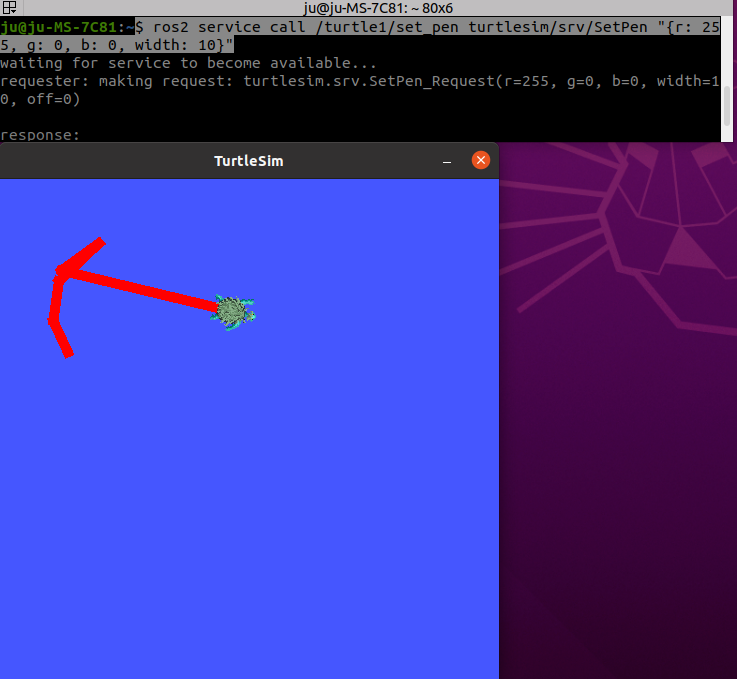
$ ros2 service call /turtle1/set_pen turtlesim/srv/SetPen "{r: 255, g: 0, b: 0, width: 10}"
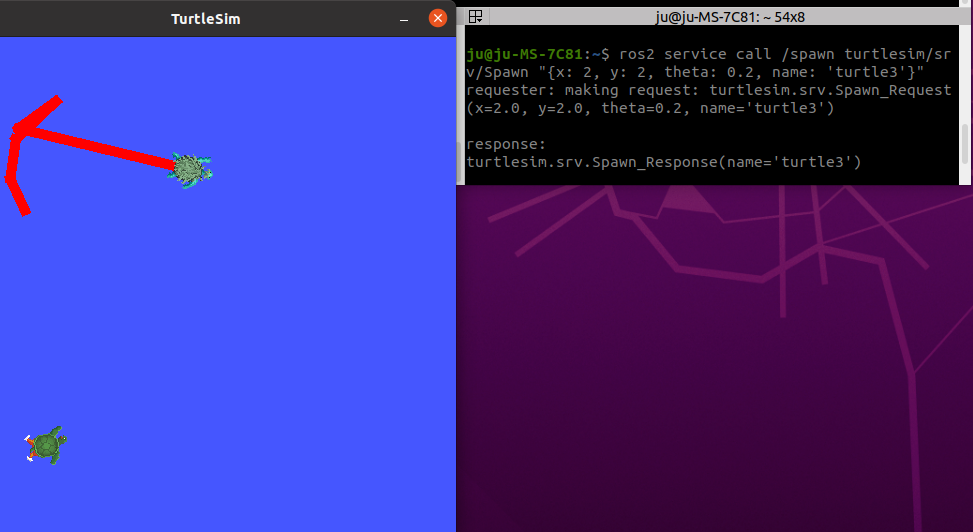
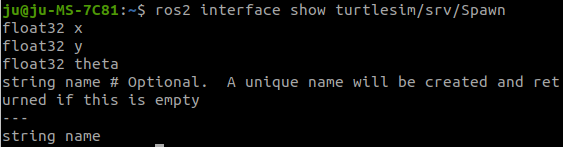
$ ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: 'turtle3'}"
2. action
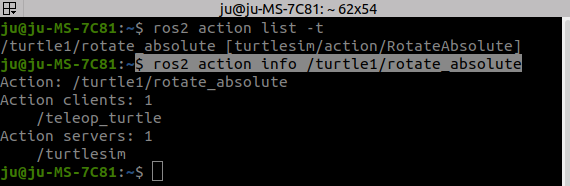
$ ros2 action list -t
$ ros2 action info /turtle1/rotate_absolute
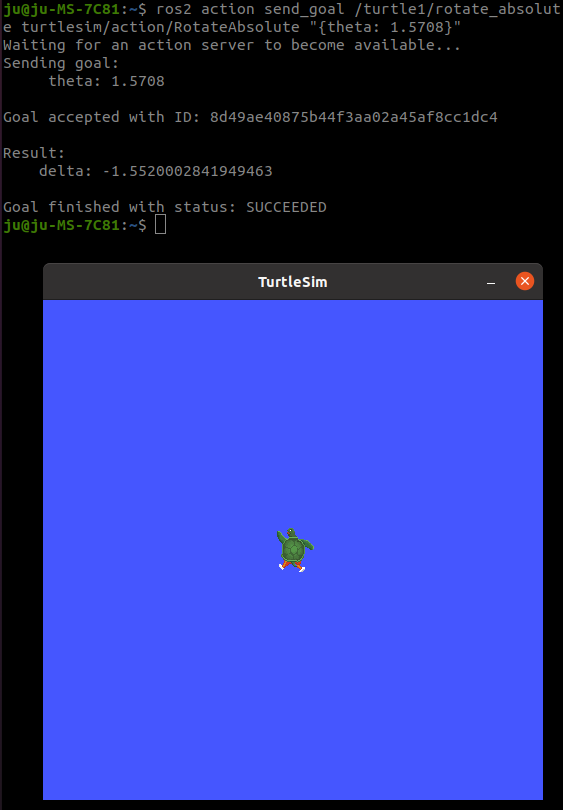
$ ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.5708}"
$ ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.5708}" --feedback
3. inerface : data type for ROS2 communication
$ ros2 topic list -t
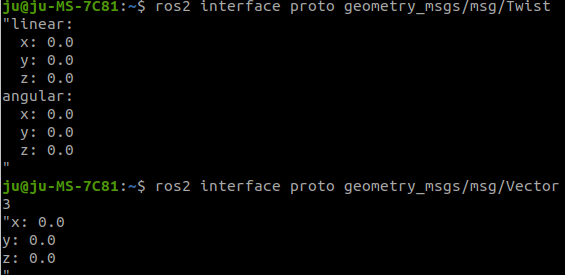
$ ros2 interface show geometry_msgs/msg/Twist
$ ros2 interface show geometry_msgs/msg/Vector3
$ ros2 interface list
$ ros2 interface packages








https://discourse.ros.org/t/mini-pupper-ros-opencv-open-source-pi-robot-dog/22177
'기계공학부 시절의 기록 > ROS2 Study' 카테고리의 다른 글
| 8week ROS homework : Simple node code explain (0) | 2021.10.25 |
|---|---|
| ROS homework week7 (0) | 2021.10.18 |
| 6 week HW Parameter control using turtlesim node (0) | 2021.10.12 |
| ROS2 course week4. homework (0) | 2021.10.06 |
| [ROS2 install] VM or dual OS(Ubuntu 20.04) 그리고 ROS2 (0) | 2021.09.13 |




댓글