목표) 로보티즈의 Open-Manipulator X를 ROS를 이용해 움직여야 한다.
www.youtube.com/watch?v=5c7s4jgB00k&t=3148s
아래의 블로그글을 참고해 잘따라하는 중이다.
43일차 - OpenManipulator 의존성 패키지 설치 및 RViz & Gazebo 테스트
OpenManipulator & MoveIt! 의존성 패키지 설치 https://emanual.robotis.com/docs/en/platform/openmanipulator_x/quick_start_guide/ sudo apt-get install ros-melodic-moveit* ros-melodic-gazebo* ros-melodi..
roomedia.tistory.com
문제1) 그런데 영상과 블로그글과는 다르게 가제보에서 로봇이 명령에 움직이지 않는다.
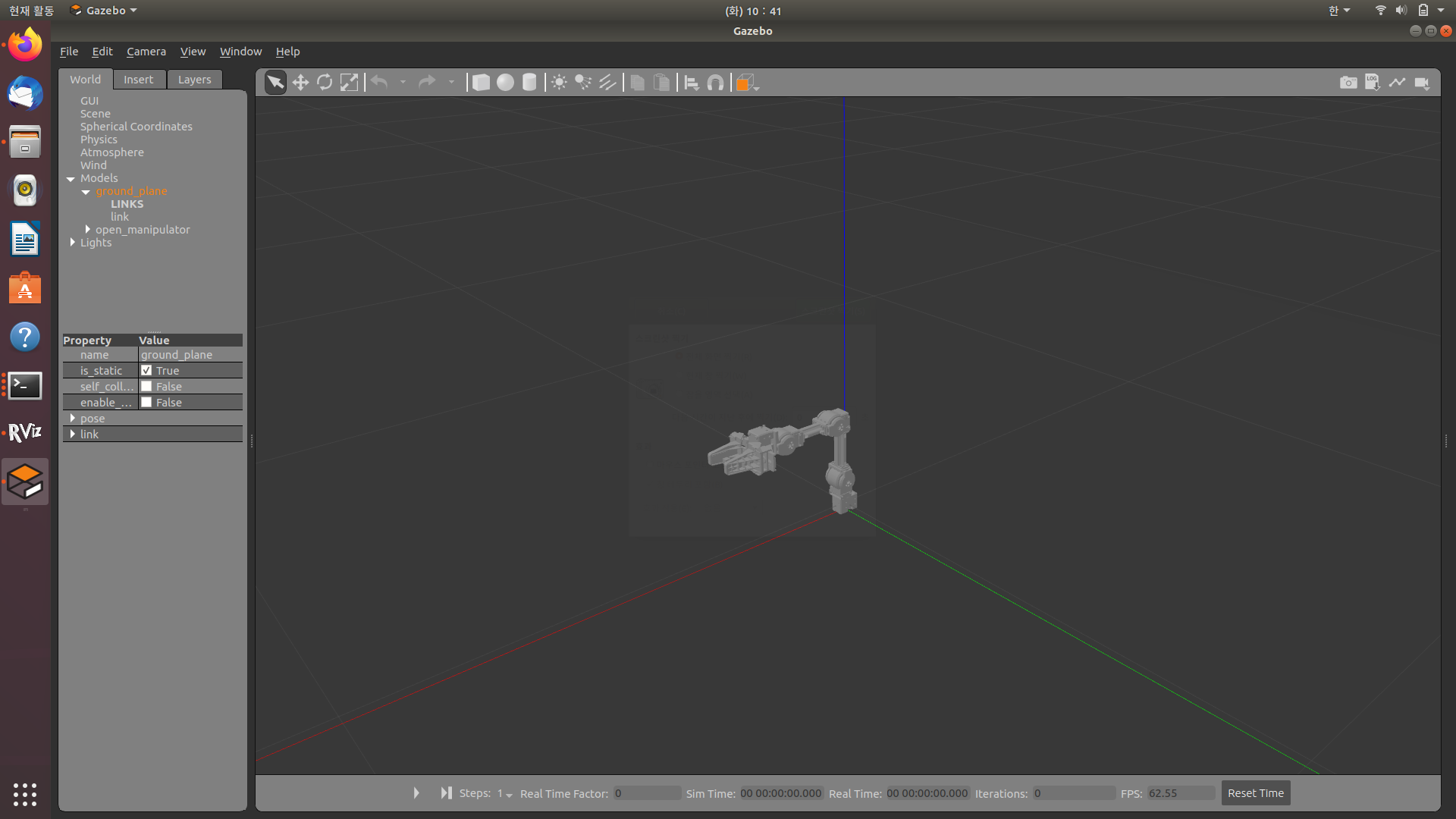
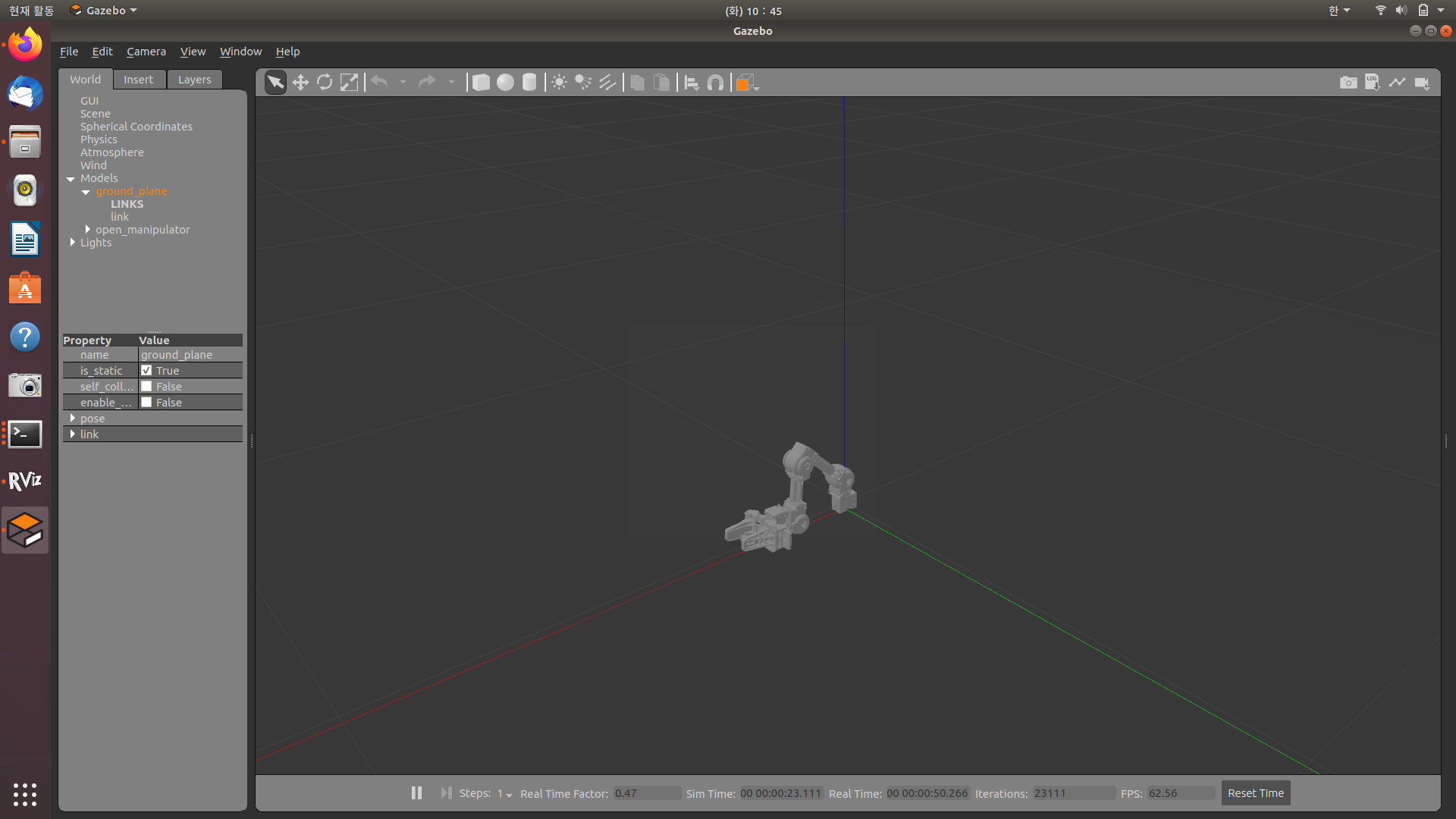
문제2) 하단의 재생버튼을 누르니 힘없이 무너진다.
오로카에서 비슷한 사례를 찾았다.
오픈소스 소프트웨어 & 하드웨어: 로... : 네이버 카페
오픈소스 소프트웨어/하드웨어로 만드는 로봇 기술 공유 카페 (ROS,ARM,AVR,mbed,라즈베리파이,아두이노)
cafe.naver.com
control 유형을 Effort에서 Position으로 바꾸면 된다고 하는데 어떻게 바꾸는지 모르겠다.
gazebosim.org/tutorials/?tut=ros_urdf
Gazebo : Tutorial : URDF in Gazebo
Tutorial: Using a URDF in Gazebo The Unified Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a robot. To use a URDF file in Gazebo, some additional simulation-specific tags must be added to work properly with
gazebosim.org
도움주신분의 댓글에서 가제보 튜토리얼로 도움을 얻을 수 있겠다 싶어서 오늘 그 튜토리얼을 따라갔다.
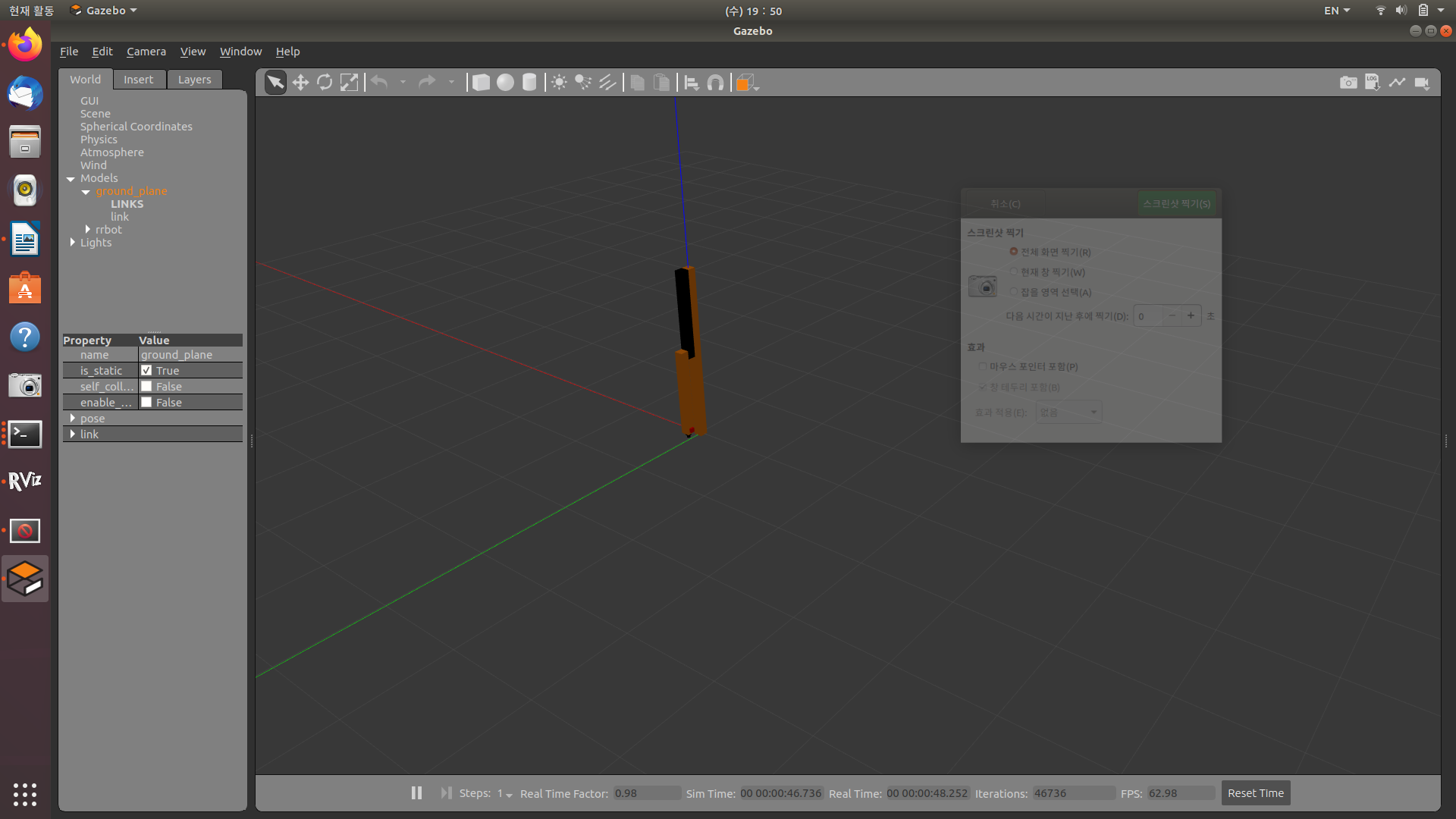
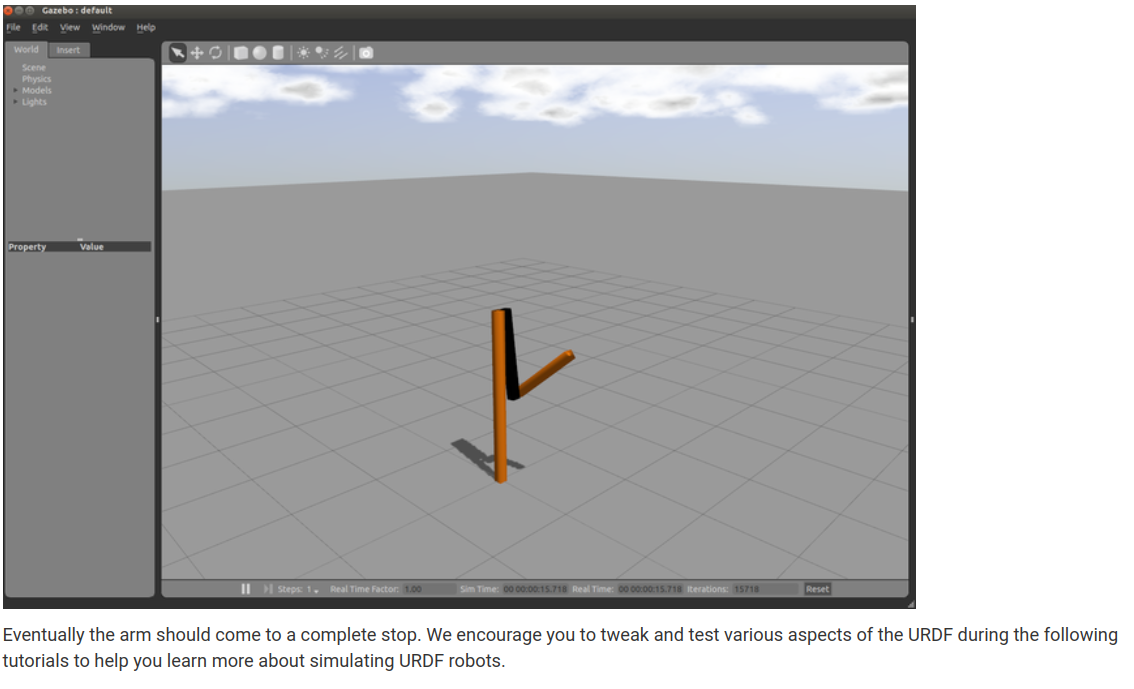
참고 글에서도 모델이 안정상태로 수렴한다고 한다. 앞으로 뭔가를 더 익혀 URDF파일을 수정해야한다고 한다.
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| 210406 다이나믹셀 펌웨어복구 오류(부트로더 오류발생) (0) | 2021.04.07 |
|---|---|
| 210404 PC와 아두이노 포트를 연결문제 해결 (0) | 2021.04.04 |
| OpenManipulator-X(1) (0) | 2021.02.25 |
| 새로운 node 추가 : subscribe와 client 수행하기 (0) | 2020.08.18 |
| 간단한 node 작성, 실행해보기 (0) | 2020.08.16 |



댓글