막연하게 연결하고 ros돌리면 되겠지 생각했는데 오산이었다.
한스텝, 한스텝 시도해보고 해결방법을 찾으며 뚫어야했다. 요 며칠간 공부한 내용을 기록해보자.
OS : ubuntu 18.04
ROS버전 : melodic
OpenManipulator HW환경 : OpenCR 1.0사용
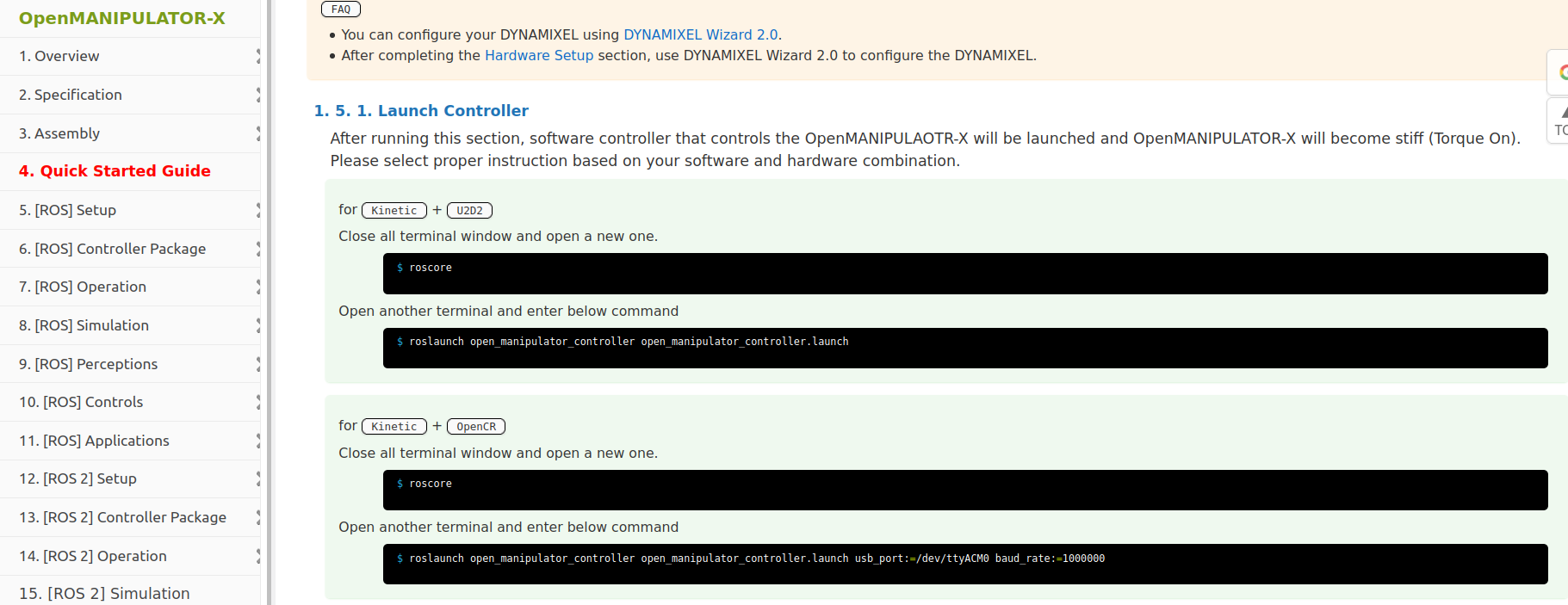
아래 링크를 중심으로 진행하고 있습니다.
emanual.robotis.com/docs/en/platform/openmanipulator_x/quick_start_guide/#quick-start-guide
ROBOTIS e-Manual
emanual.robotis.com
1. 로봇팔제어방법에는 크게 두가지가 있다.
첫번째, PC중심 제어
PC(ROS)-ARDUINO-OpenManipulator로 내가 하고자 하는 제어방법이다.
두번째, ARDUINO중심 제어
코딩한 것을 아두이노에 업로드하여 아두이노 중심으로 로봇팔을 제어하는 방법이다. ROS를 쓰지 않는 방법이다.
2. Dynamixel 포트연결문제
[문제개요]
-OpenManipulator - 4.Quick Started Guide를 따라하는 중 하드웨어 연결하고 컨트롤 패키지를 실행해보니 포트연결이 안되었다고 실행이 안됨. 그래서 한참을 헤매다가 아휴 다른 방법으로 해보자며 넘어감
-6.1 컨트롤러 패키지 실행에서도 막힘.
이거 USB문제 아니야?? 하며 윈도우에서도 연결해보았다. 그랬더니 '알수없는 USB장치'가 뜸.
-위자드에서도 포트연결이 안됐다며 아예 포트선택창에서도 포트가 검색되지 않음.

[해결방법] 아두이노 펌웨어 리셋 후 아두이노를 통해 펌웨어 다운로드

나는 펌웨어 다운한 적이 없는데?! 하며 그냥 지나쳤는데 이것이 해결방법이었다.
아래 링크에서 큰 도움을 받았다. 아래의 방법대로 OPenCR을 리셋을 먼저 한다.
www.robotis.com/service/forum_view.php?bbs_no=2589630&id_memory=1
ROBOTIS
액츄에이터 기반 실내/외 자율주행로봇 및 서비스로봇 솔루션 전문 업체.
www.robotis.com
펌웨어 다운은 아래 링크에서 ctrl+F로 firmware를 찾으면 op3를 다운로드하는 과정이 있다. 이를 따라하면 된다.
emanual.robotis.com/docs/en/parts/controller/opencr10/#install-on-linux
ROBOTIS e-Manual
emanual.robotis.com
이 후 LED예제코드가 실행되는 것을 봤을 땐 너무 기뻤다.
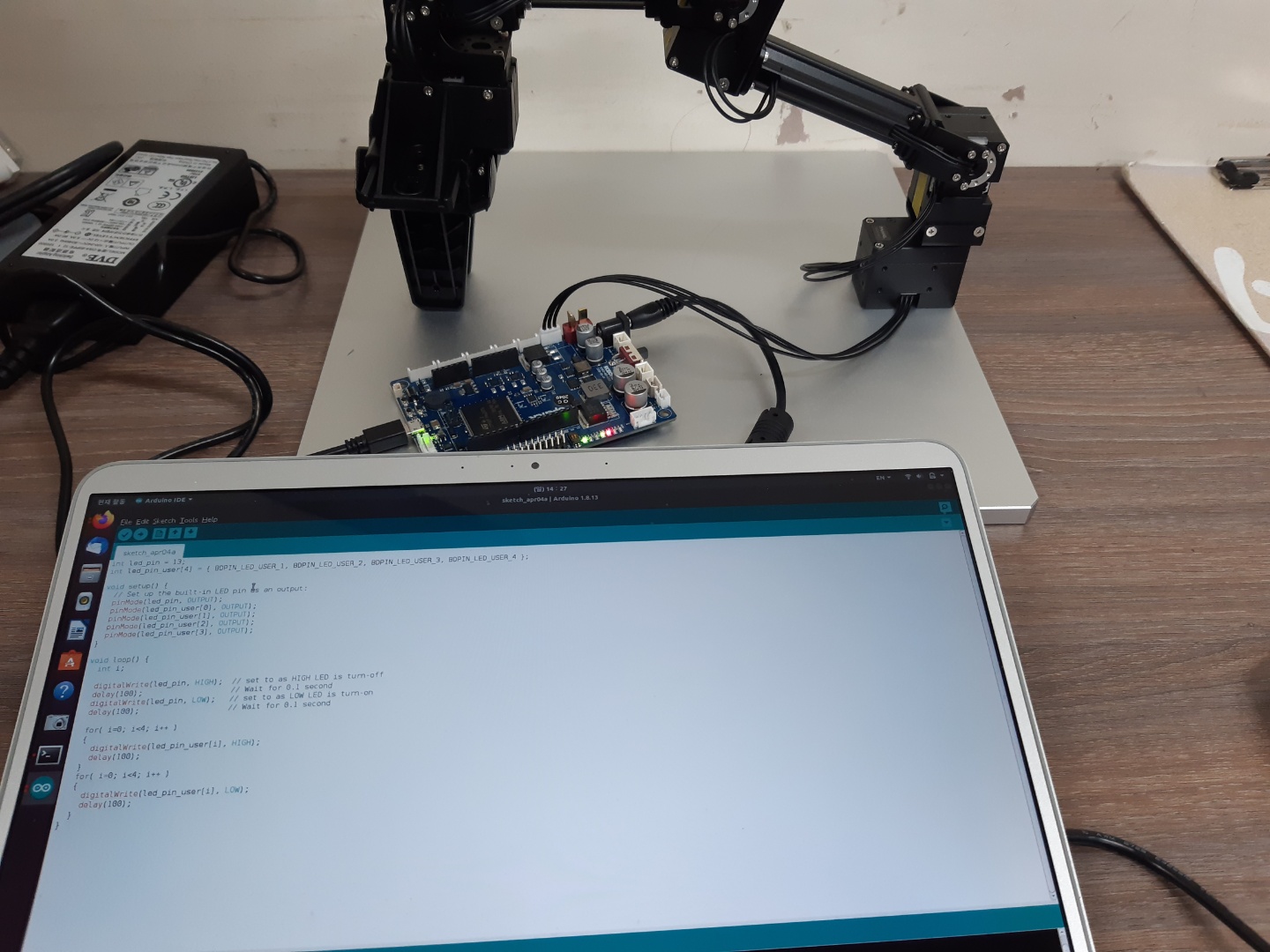
처음으로 돌아가 e메뉴얼 QuickStarte에서 아래 코드를 실행하니 성공!


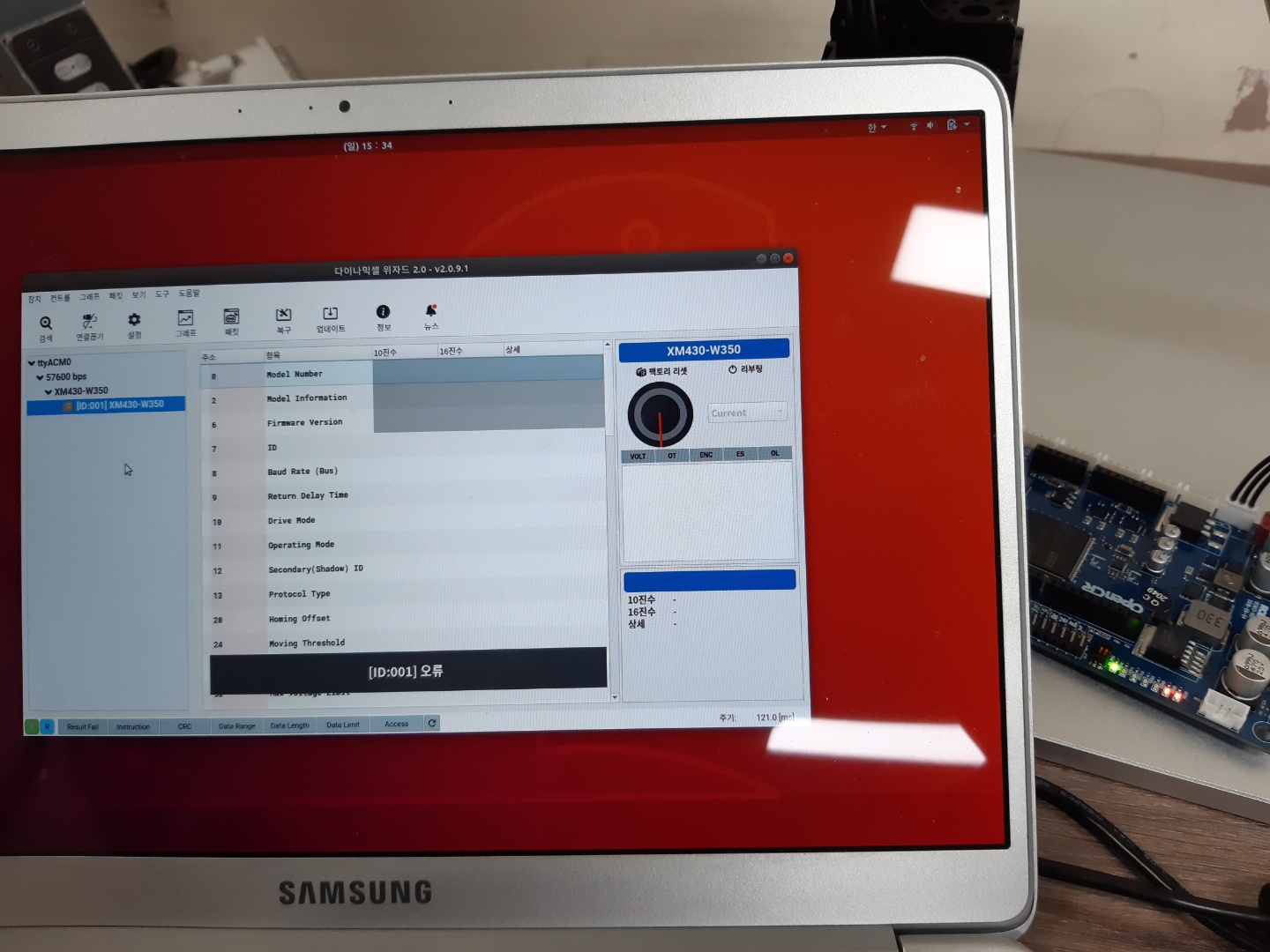

[문제발생2](해결중) 컨트롤러에서 Dynamixel 인식이 안됨

[진행해볼 방법]
아래 링크에서 아두이노가 인식하는 다이나믹셀을 찾는 방법과 해결방향을 찾음.
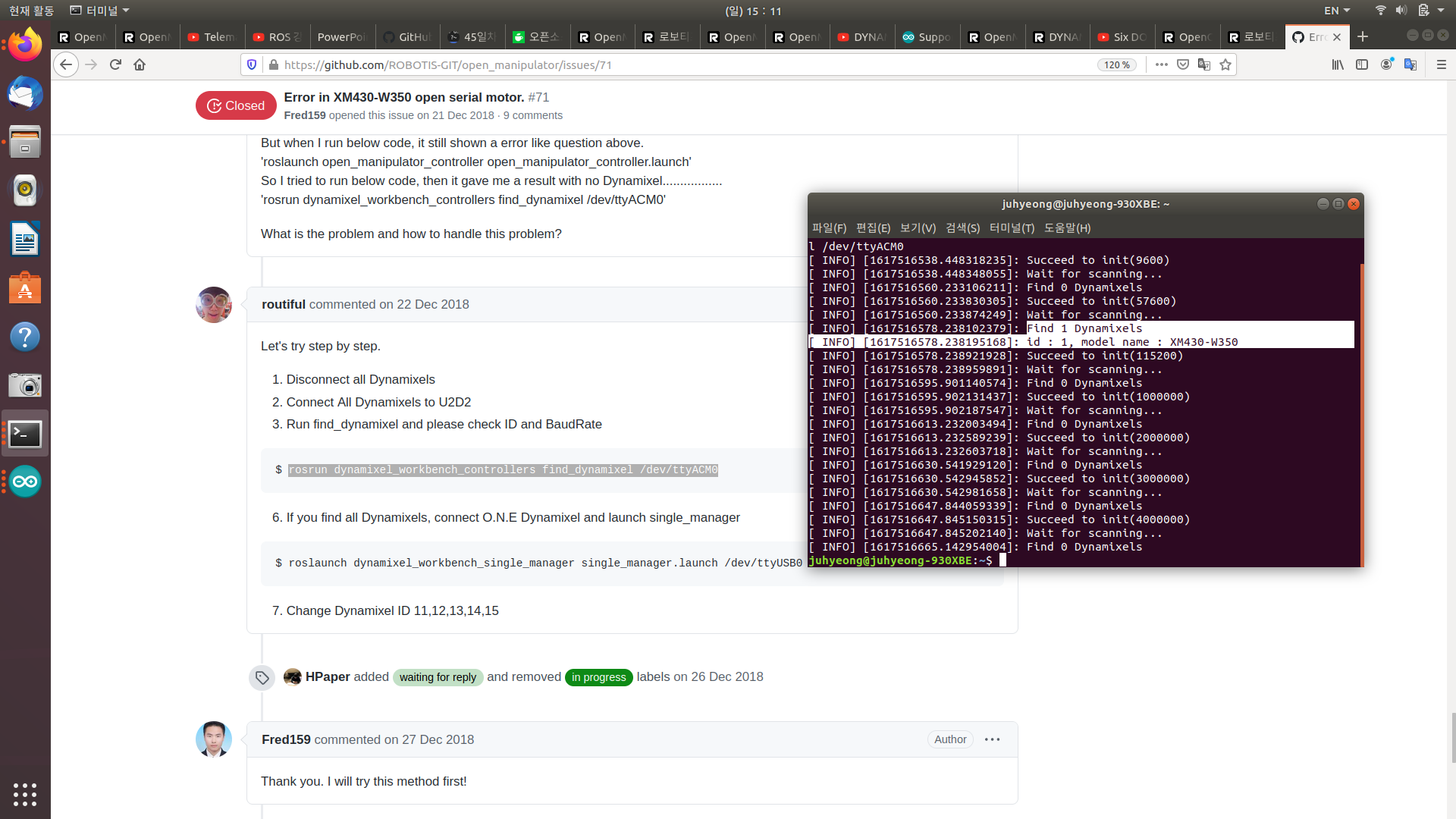
해결방향은 다이나믹셀 위자드를 통해서 다이나믹셀ID를 1~4로 되어 있는 것을 11~14로 바꿀 예정.
github.com/ROBOTIS-GIT/open_manipulator/issues/71
Error in XM430-W350 open serial motor. · Issue #71 · ROBOTIS-GIT/open_manipulator
ming@ming-Lenovo-ideapad-330-15ICH:~/opencr_update$ roslaunch open_manipulator_controller open_manipulator_controller.launch ... logging to /home/ming/.ros/log/dec163c4-04c5-11e9-ba1b-983b8fe14d12/...
github.com
www.robotis.com/service/forum_view.php?bbs_no=2591094&page=1&save_sca=&sca=&save_stx=&stx=&sfl=
ROBOTIS
액츄에이터 기반 실내/외 자율주행로봇 및 서비스로봇 솔루션 전문 업체.
www.robotis.com
-다이나믹셀위자드2.0 E메뉴얼
emanual.robotis.com/docs/en/software/dynamixel/dynamixel_wizard2/얼
ROBOTIS e-Manual
emanual.robotis.com
참고)
최종적으로 하고 싶은 퍼포먼스가 담긴 영상.
ROS상에서 인공지능, OpenCV를 활용하고 싶다.
www.youtube.com/watch?v=G_EvFqO7VHM
-아두이노로 TO 다이나믹셀 연습예제
www.youtube.com/watch?v=0_M0Da9SHDw
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| 0407 다이나믹셀 연결성공 (0) | 2021.04.07 |
|---|---|
| 210406 다이나믹셀 펌웨어복구 오류(부트로더 오류발생) (0) | 2021.04.07 |
| rviz, gazebo에서 모델 붕괴 (0) | 2021.03.10 |
| OpenManipulator-X(1) (0) | 2021.02.25 |
| 새로운 node 추가 : subscribe와 client 수행하기 (0) | 2020.08.18 |



댓글