cafe.naver.com/openrt/25395?boardType=L
오픈매니퓰레이터 moveit으로 실물구동 제어방법
우분투 18.04, melodic 제어기 : opencr 1.0 오픈매니퓰레이터 x의 e매뉴얼을 보며 따라했을 때 (질문) Quick Started Guide의 방법으로는...
cafe.naver.com
어제 질문한 글에 답변을 받았는데 퀵스타트와 무브잇을 이용한 매니퓰레이터 제어에는 rosserial이 필요없다는 답변이었다.
현상황 정리)
2가지 실습예제가 있다.
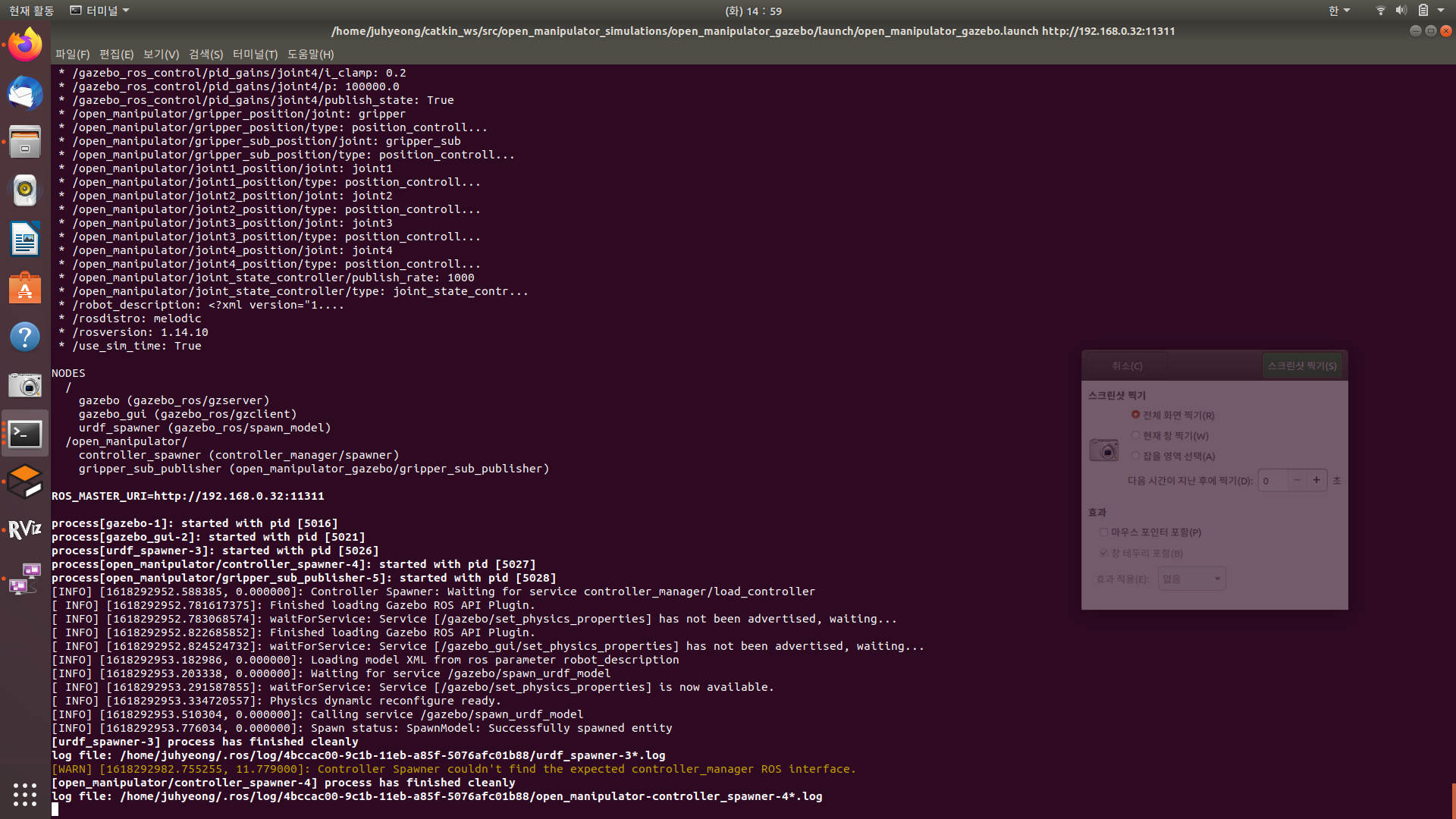
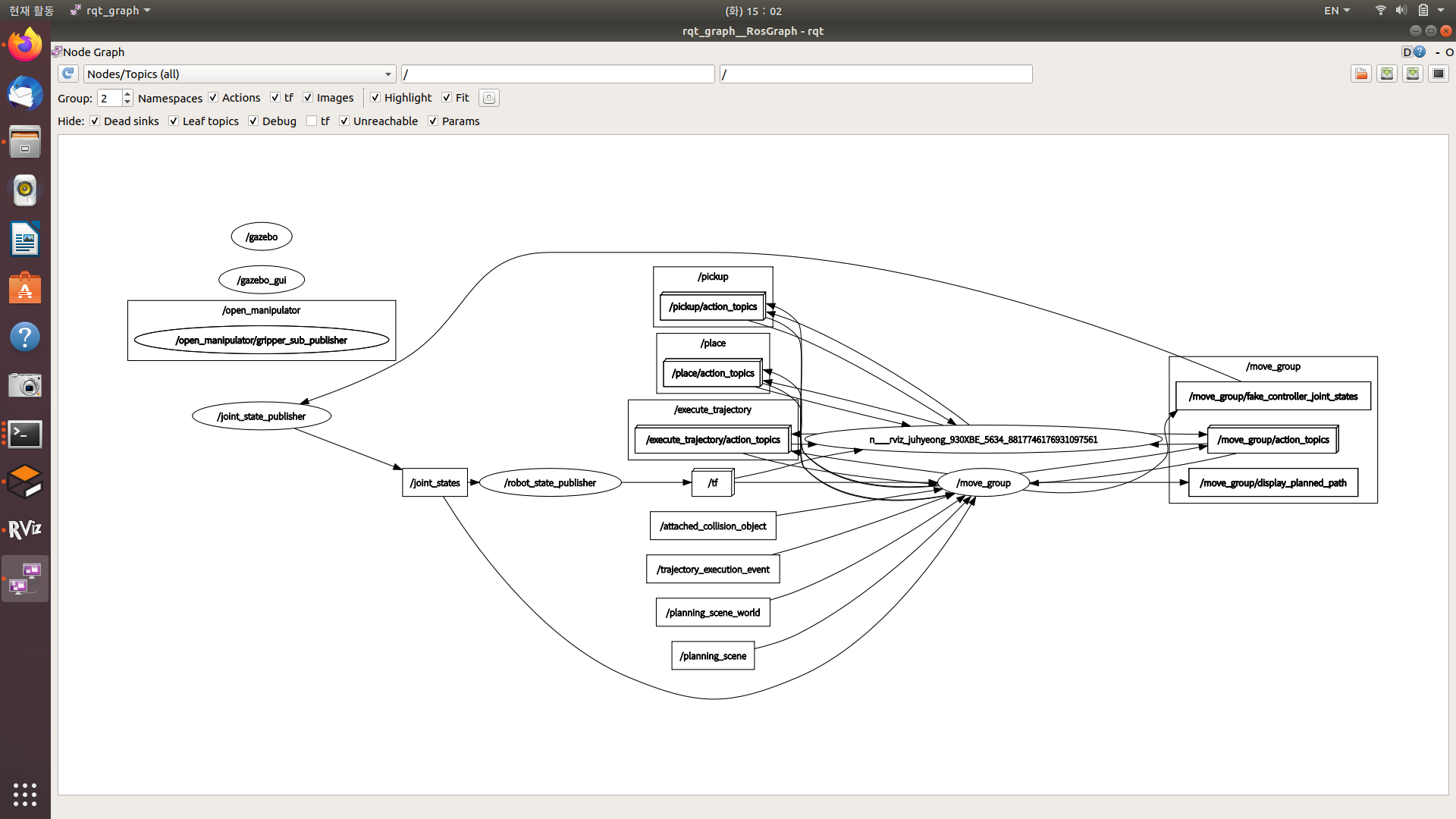
1. 가제보 + 무브잇
www.youtube.com/watch?v=5c7s4jgB00k&t=4994s
--> 가제보 터미널에서 Controller Spawner couldn't find the expected controller_manager ROS interface.에러 발생, 무브잇에서의 움직임 반영하지 못함


아래 링크를 참고해서 후에 풀어보자
2. 실제 매니퓰레이터+무브잇
emanual.robotis.com/docs/en/platform/openmanipulator_x/ros_controls/
-->[WARN] [1618296403.903697]: wait_for_service(/controller_manager/load_controller): failed to contact, will keep trying



!!!!윗부분처럼 포트명을 opencr에 맞게 수정하니 로봇이 무브잇에 연동해 움직이기 시작했다!!!!


느낀점 : 뭔가 문제가 있다면 연결고리를 찾아 하나씩 하나씩 파고들고 뒤져보자
[다음 해보고 싶은것 list]
1. 오픈매니퓰레이터 1대로 pick&place
2. 오픈매니퓰레이터 1대 + 내가 만든 로봇팔 1대 동기화
emanual.robotis.com/docs/en/platform/openmanipulator_x/ros_applications/#ros-applications
ROBOTIS e-Manual
emanual.robotis.com
3. 로봇팔 끝단의 진동 줄이기 고민
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| 매니퓰레이터 with PI카메라(링크기록) (0) | 2021.04.19 |
|---|---|
| ROS강의 CH.4 중요컨셉 (0) | 2021.04.13 |
| Opencr에 rosserial 설치 (0) | 2021.04.12 |
| rosserial, QT UI, 임피던스 (0) | 2021.04.11 |
| gazebo 붕괴현상 잠시 생각, moveit-rosserial? (0) | 2021.04.09 |

댓글