[지난 글 마지막 미션]
CR과 RP를 연결하고 RP와 PC를 같은 네트워크상에서 통신하는 법을 찾아봐야 한다.션
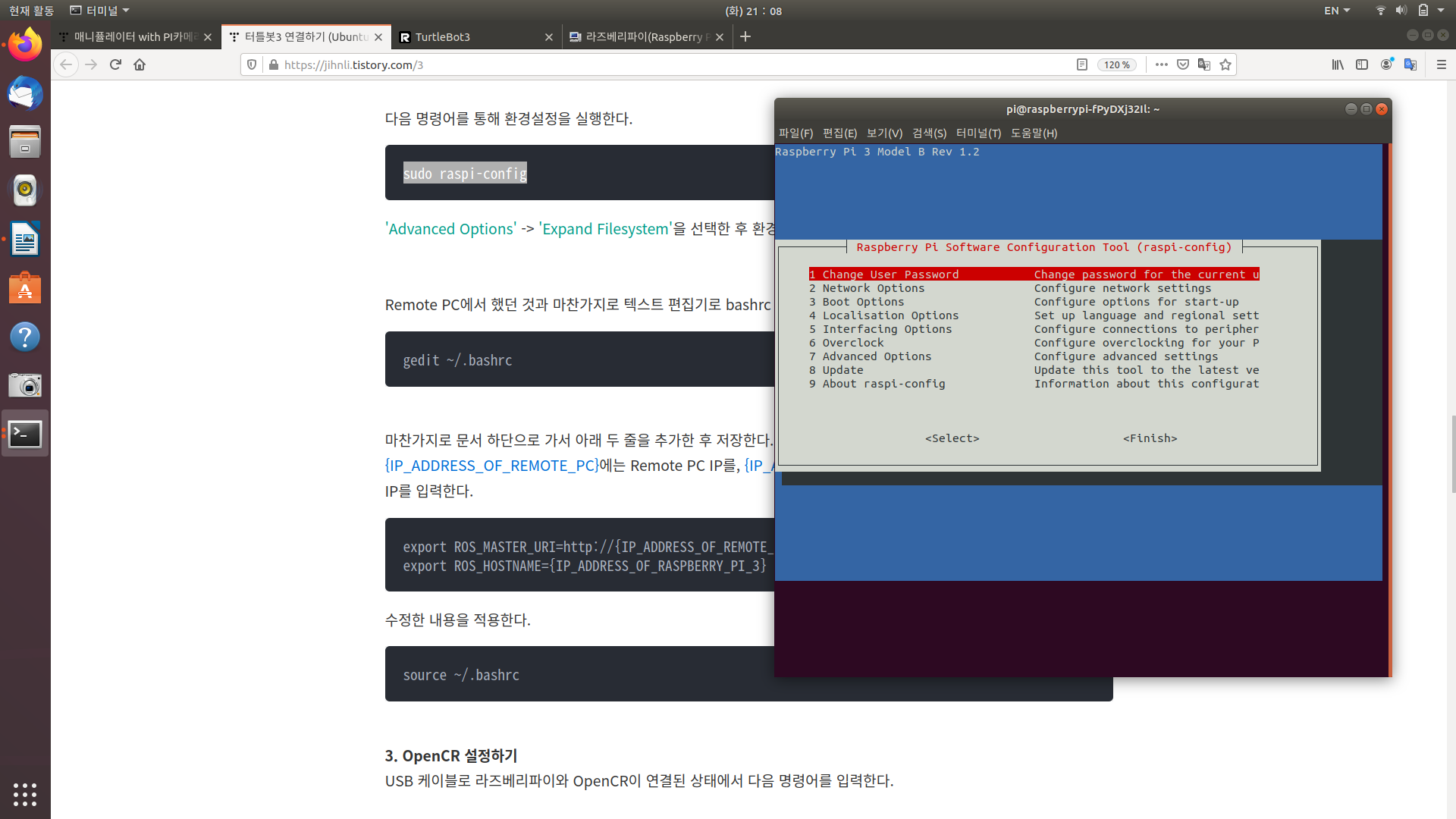
1. RP와 PC를 같은 네트워크상에서 통신
2.CR과 RP를 연결
1. RP와 PC를 같은 네트워크상에서 통신
[라즈베리파이-PC연결 E메뉴얼]
emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/
ROBOTIS e-Manual
emanual.robotis.com
[E메뉴얼을 풀어쓴 블로그]
터틀봇3 연결하기 (Ubuntu 18.04, ROS Melodic)
Remote PC에 Ubuntu 18.04, ROS1(Melodic)을 설치한 후 로보티즈 e매뉴얼을 따라 세팅했다. emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/ ROBOTIS e-Manual emanual.robotis.com 1. Remote PC..
jihnli.tistory.com
위 두개의 블로그를 보며 라즈베리파이와 메인PC를 bashrc에 ip주소를 저장하였고
그 결과 PC상에서 라즈베리파이에 접속할 수 있었다.
2.CR과 RP를 연결
케이블이 없다...?!
터틀봇의 경우 케이블이 제공되지만 나의 경우 매니퓰레이터로 진행하므로 연결케이블을 따로 구매하지 않았다.
아! 그게 아니라 원래 PC-OpenCR을 연결해주는 USB케이블을 이용하면 OpenCR-Raspberrypi를 연결할 수 있다.
그런데 생각해보니
pc와 rp는 같은 네트워크상를 공유시켜 pc에서 rp를 하나의 노드로 사용할 수 있게 하고
rp와 cr을 직렬연결해 버리면, pc가 아닌 rp가 메인컴퓨터가 되어 rp상에서 로봇팔을 움직여야 한다.
그렇다면 rp와 cr을 분리하고 rp는 오로지 라즈베리파이 카메라로부터 이미지만 가져오도록하고 그 이미지를 pc에서 처리해야 할 것이다.
공동 네트워크를 통해 rp와 pc끼리 통신할 수 있게 되었으므로 rp로부터 얻은 데이터를 pc에서 활용할 수 있을 것이다.
자, 이제 다시 아래의 블로그로 돌아가 진행해볼 수 있겠다.
suho0515.blogspot.com/2019/11/pick-and-place-using-inceptionv3-in-ros.html
[Pick and Place using Inception_v3 in ROS] #02. Making open_manipulator_recording_trajectory node
이제 #01 에서 리뷰한 코드를 기반으로 한 개의 Manipulator 만의 Trajectory( joint value ) 를 Recording 할 수 있는 source를 만들 것이다. PC Enviroment ( Labtop ) OS : ...
suho0515.blogspot.com
참고)
라즈베리파이 종료 명령어
라즈베리파이 간단한 종료 명령어 - 라즈베리파이를 안전하게 종료하기
라즈베리파이에는 전원을 제어할 수 있는 버튼이나 스위치가 없습니다. 이 때문에 라즈베리파이의 전원선을 분리하여 강제 종료를 하는 경우가 많은데요, 강제 종료를 하게 되면 라즈베리파이
icaynia.tistory.com
sudo shutdown -h now
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| 저장된 경로 읽어 움직이기/영상송수신 (0) | 2021.04.21 |
|---|---|
| Openmanipulator trajectory save(경로저장) (1) | 2021.04.21 |
| 매니퓰레이터 with PI카메라(링크기록) (0) | 2021.04.19 |
| ROS강의 CH.4 중요컨셉 (0) | 2021.04.13 |
| 무브잇-오픈매니퓰레이터 연동 첫 성공!! (0) | 2021.04.13 |



댓글