지난 글의 작업을 통해
open_manipulator_recording_trajectory.launch를 통해 경로를 저장하는 역할을 수행할 노드를 실행시킬 수 있게 됐다.
이제 다음은 저장된 경로를 읽어와 그 경로를 따라 로봇팔을 움직이게 하는 것이다.
참조링크
suho0515.blogspot.com/2019/11/pick-and-place-using-inceptionv3-in-ros_13.html
[Pick and Place using Inception_v3 in ROS] #03. Making open_manipulator_play_recorded_trajectory node
#02까지는 Manipulator의 trajectory를 recording 하는 소스코드를 구현하였다. #03에서는 인식된 Object에 따라서 각각의 Trajectory를 수행하도록 할 것이다. PC Enviroment ( Labtop ) ...
suho0515.blogspot.com
open_manipulator_play_recorded_trajectory.launch를 통해 만든 노드가 그 역할을 수행할 것이다.
suho님 블로그의 소스코드를 불러와 붙여넣고
cmakelists와 launch파일 역시 수정해주었다.
이후 catkin_make를 실행하니 오류가 발생한다.
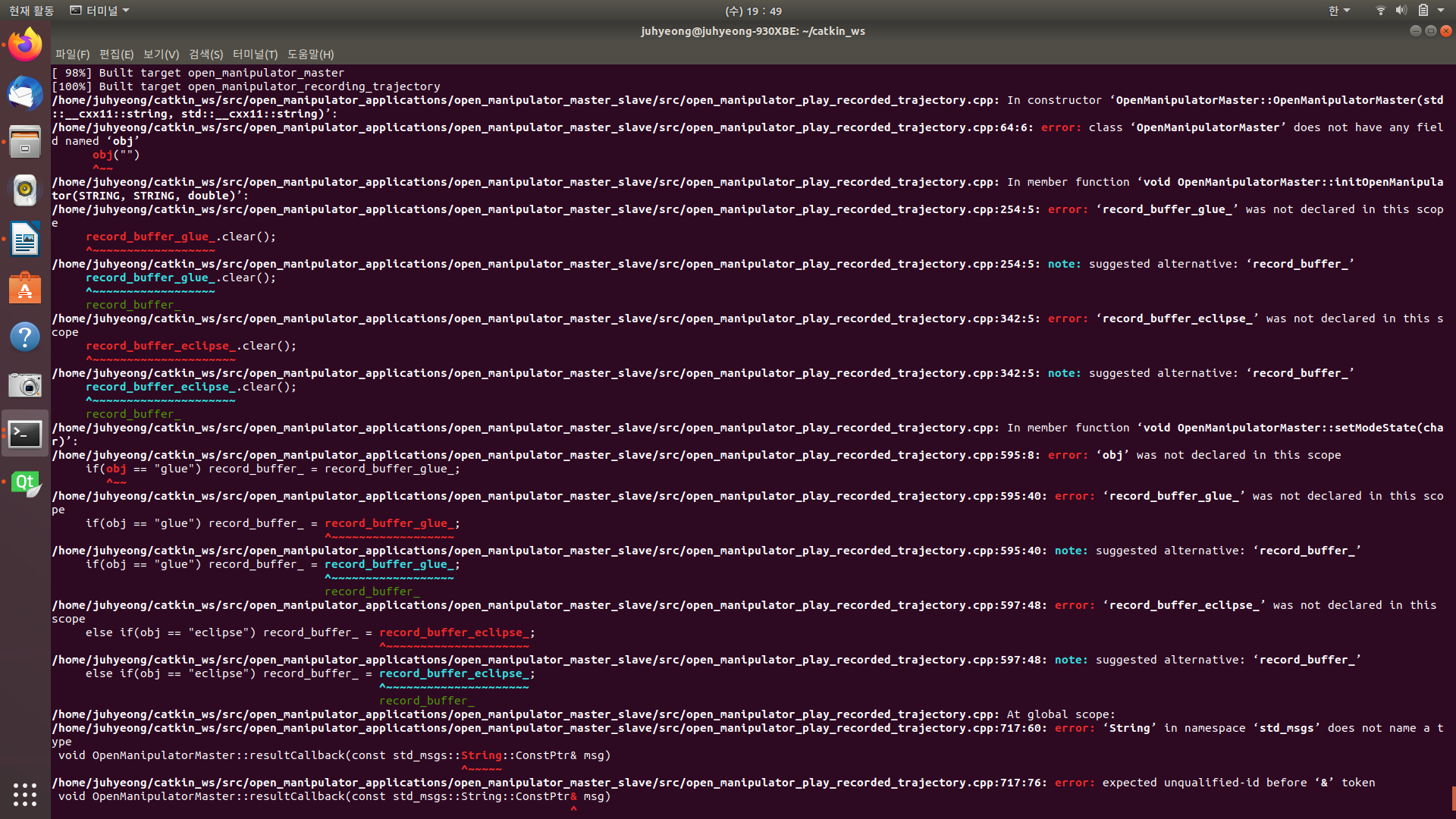
/src에 있는 open_manipulator_play_recorded_trajectory.cpp을 열어 자세히 살펴보자.
아무래도 생성된 사진파일들이랑 관련되어 있는 것 같다.
사진파일 생성과 관련된 부분을 먼저 해보자.
위 링크의 3. ros_inception_v3 node 로부터 result 받기.부분을 먼저 해본다.
텐서플로우를 설치하는 과정, 4. install tensorflow to python2에서 에러가 발생했다.
ERROR: pip's legacy dependency resolver does not consider dependency conflicts when selecting packages. This behaviour is the source of the following dependency conflicts.
launchpadlib 1.10.6 requires testresources, which is not installed.
ros를 활용한 영상송수신 참조링크
injae-kim.github.io/robot_operating_system/2019/07/08/ros-realtime-video-transmission.html
Injae's devlog
현실의 문제를 해결하는 엔지니어
injae-kim.github.io
너무 복잡하다....
모르겠ㄷ.....
그냥 우선 노트북에서 라즈베리파이를 터미널에서 열고 해당터미널을 통해 사진을 찍거나 실시간으로 학습해 그 결과를 데이터화해서 다른 노드로 전달해줄 수 있는 방법을 찾아보자.
참고)
소스코드해석에 도움이 된 링크참조
ros 2일차 - pub과 sub를 해보자
https://www.youtube.com/watch?v=iGdQHi_wL1Y&index=7&list=PLRG6W...
blog.naver.com
참고)
클래스와 객체
www.google.com/search?channel=fs&client=ubuntu&q=class+%EC%97%AD%ED%95%A0
class 역할 - Google 검색
MATLAB에서 클래스의 역할. 클래스. MATLAB® 언어에서 각각의 값은 클래스에 속하게 됩니다. 예를 들어, 대입문을 사용하여 변수를 생성하면 적합한 클래스의 ...
www.google.com
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| [myo-ros] myo 연결 (0) | 2021.06.29 |
|---|---|
| 라즈베리파이 노드에서 영상처리하기 (0) | 2021.04.22 |
| Openmanipulator trajectory save(경로저장) (1) | 2021.04.21 |
| 라즈베리파이, PC 연결성공 (0) | 2021.04.20 |
| 매니퓰레이터 with PI카메라(링크기록) (0) | 2021.04.19 |



댓글