728x90
반응형
목표
myo armband에 장착된 자이로센서로부터 위치정보와 속도, 가속도 정보를 이용해 로보티즈 Openmanipulator-x 구동
개발환경
OS : ubuntu 18.04
SW : ros1 melodic
HW : myo armband, Openmanipulator-x, PC(삼성always9, i5, 내장그래픽)
참고논문
전 세 윤, 박 범 용, "근전도센서를 이용한 기반의 산업용 로봇 원격제어", 2020
활용 패키지
myo ros package
https://github.com/uts-magic-lab/ros_myo
uts-magic-lab/ros_myo
Myo armband ROS wrapper. Contribute to uts-magic-lab/ros_myo development by creating an account on GitHub.
github.com
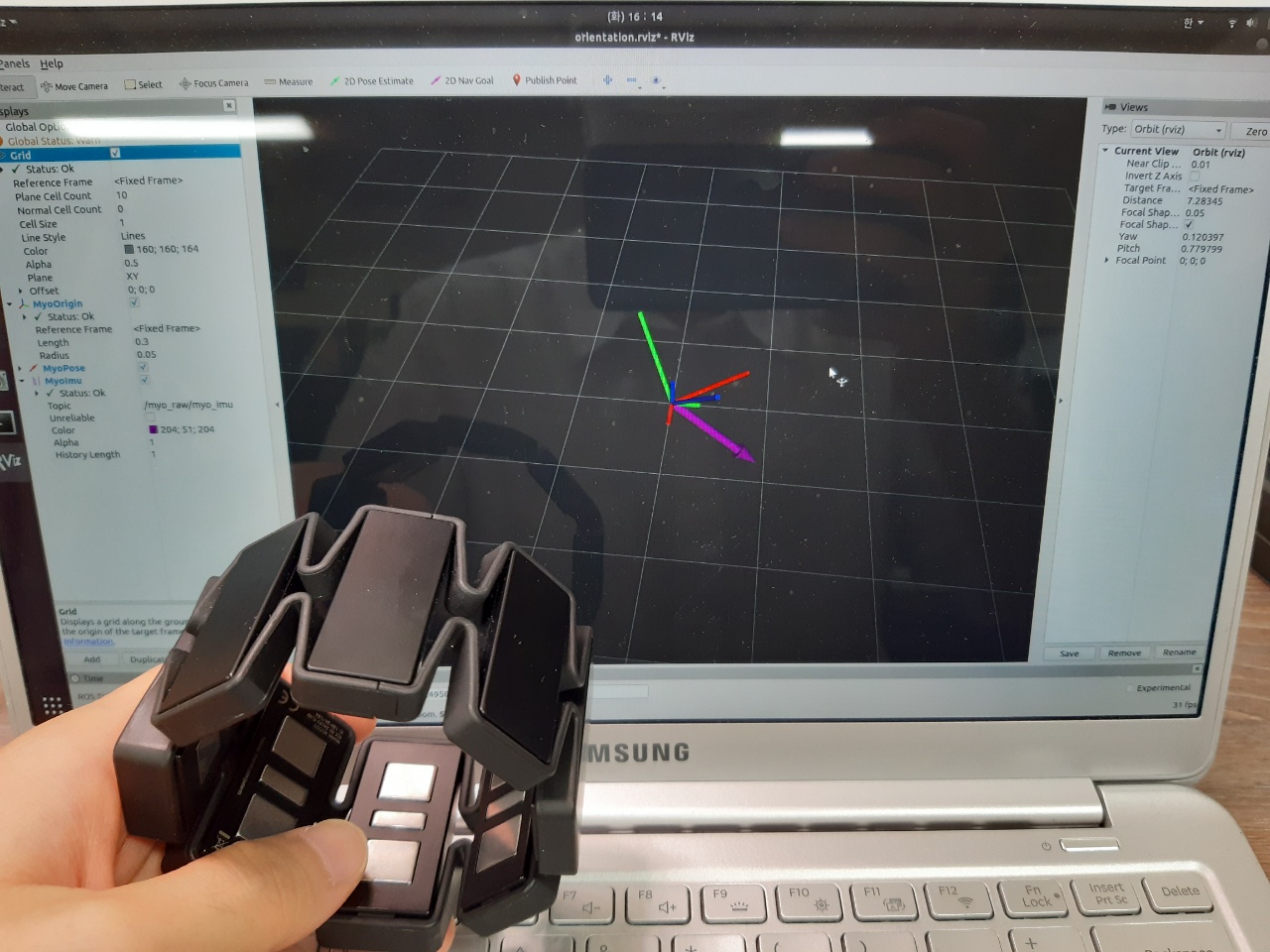
먼저 myo 밴드의 ros패키지를 찾아 실행시켜보는 것을 하였다.
오랜만에 ros를 켜서 패키지를 추가하고 catkin_make를 하는 것을 까먹고 있었다.
패키지를 다운 받고 빌드를 한 뒤 아래의 명령어를 통해서 myo를 rviz로 실행할 수 있었다.
roslaunch ros_myo myo.launch
다음고민.
myo에서 myo.launch를 통해 방향정보와 속도, 가속도 정보를 rviz로 볼 수 있었다. 이 데이터를 숫자로써 Openmanipulator로 전달하는 방법은??
728x90
반응형
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| bashrc 복구 (Command 'roscore' not found, 다음 패키지의 의존성이 맞지 않습니다.) (0) | 2021.07.19 |
|---|---|
| myo에서 데이터 확인하기 (0) | 2021.06.30 |
| 라즈베리파이 노드에서 영상처리하기 (0) | 2021.04.22 |
| 저장된 경로 읽어 움직이기/영상송수신 (0) | 2021.04.21 |
| Openmanipulator trajectory save(경로저장) (1) | 2021.04.21 |


댓글