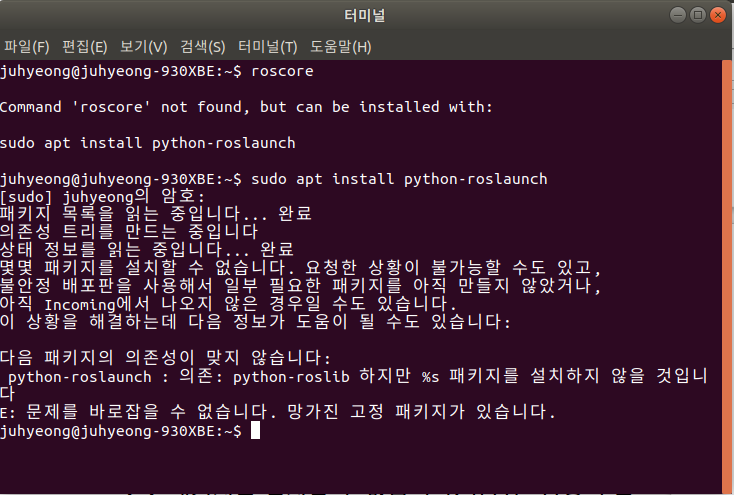
2주만에 roscore을 실행하자 아래의 오류가 떴다.
패키지의 의존성이 맞지 않는다는 내용이다.
결과적으로 bashrc가 초기화된 것이 원인이었고 bashrc를 다시 복구하는 과정을 본 글에 정리하였다.
오늘 오전을 매달린 결과물이다.
1. cp /etc/skel/.bashrc ~/
위 명령문을 통해서 디폴트 bashrc를 복사해 홈파일에 복사한다
2. bashrc에 아래의 내용을 추가한다.
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
# Set ROS Network
export ROS_HOSTNAME=ip주소
export ROS_MASTER_URI=http://${ROS_HOSTNAME}:11311
# Set ROS alias command
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'에
3. source ~/.bashrc
변경된 bashrc를 적용시킨다.
참고자료
1. 문제의 원인을 알게됨.
source /opt/ros/melodic/setup.bash가 필요함을 알게되었고
더나아가 bashrc가 초기화되어 있음을 알게됨
https://answers.ros.org/question/258444/sudo-apt-install-catkin-not-working/
sudo apt install catkin not working. - ROS Answers: Open Source Q&A Forum
sudo apt install catkin not working. edit Hi, I'm a newbie, so sorry if this is really obvious. I'm following the Tutorials instructions having just installed ROS on Ubuntu Mate. The current step says $ cd ~/catkin_ws/ $ catkin_make but when I enter "catki
answers.ros.org
2. bashrc 복구방법
오픈소스 소프트웨어 & 하드웨어: 로... : 네이버 카페
오픈소스 소프트웨어/하드웨어로 만드는 로봇 기술 공유 카페 (ROS,ARM,AVR,mbed,라즈베리파이,아두이노)
cafe.naver.com
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| myo_raw데이터를 로봇제어 가능한 데이터로 변환 (0) | 2021.07.30 |
|---|---|
| 필요 패키지들 (0) | 2021.07.29 |
| myo에서 데이터 확인하기 (0) | 2021.06.30 |
| [myo-ros] myo 연결 (0) | 2021.06.29 |
| 라즈베리파이 노드에서 영상처리하기 (0) | 2021.04.22 |

댓글