현재 진행하고 있는 프로젝트로 졸업논문을 쓰려고하는데 교수님께 결과물을 보여야하는 시기가 5월 중순이다.
얼마남지 않았지만 최선을 다해 완성도를 높여보자
논문이란,, 지금 나에게는 다른 누군가가 나의 논문을 보고 아 이렇게 했구나, 이런 이유로 이렇게 했구나하며 논리적으로 이해가 가면서 따라할 수 있게끔 하는 것이라 생각한다.
아래 블로그는 나에게 있어 하나의 논문이라는 생각이 든다.
suho님에게 너무나 감사하다.
[해야할 것]
1. 로봇팔 경로 저장
2. 라즈베리파이 카메라로 학습할 레이블 사진 찍기
1. 로봇팔 경로 저장
-소스코드 따오기
아무튼 오늘 할 것은 로봇팔의 경로를 저장하는 것.
이를 위해서는 먼저 master-slave 예제소스코드를 변경해야한다.
suho0515.blogspot.com/2019/11/pick-and-place-using-inceptionv3-in-ros.html
[Pick and Place using Inception_v3 in ROS] #02. Making open_manipulator_recording_trajectory node
이제 #01 에서 리뷰한 코드를 기반으로 한 개의 Manipulator 만의 Trajectory( joint value ) 를 Recording 할 수 있는 source를 만들 것이다. PC Enviroment ( Labtop ) OS : ...
suho0515.blogspot.com
블로그를 보며 master-slave 원본 예제 소스코드와 suho님이 수정한 소스코드를 비교해가며 보니 후반부에 삭제, 수정된 부분이 많이 보이고 불필요한 slave관련코드들을 지우고 함수명을 수정하는 과정이 있었다.
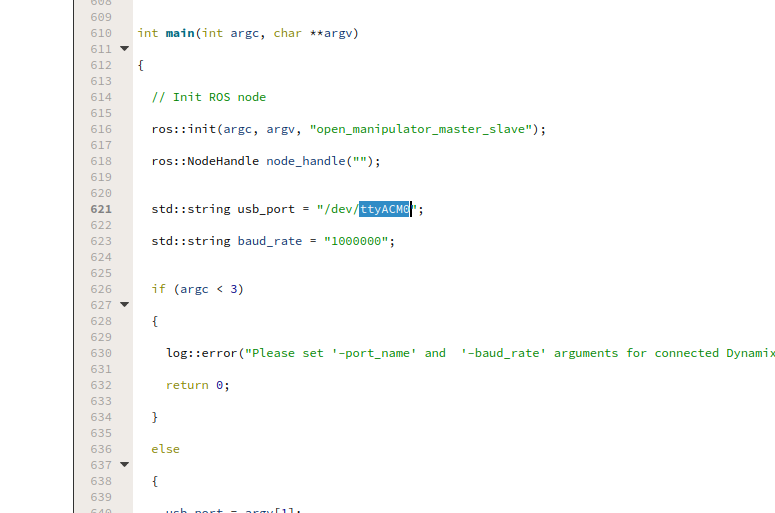
그리고 추가적으로 위 블로그에서는 U2D2를 사용하지만 나는 OpenCR을 사용하므로 포트명을 ttyACM0로 수정해주어야 한다.
-CMakeLists파일 수정

[문제발생]
roscore를 실행하면,
WARNING: ROS_MASTER_URI [http://{IP_ADDRESS_OF_REMOTE_PC}:11311] host is not set to this machine
아무래도 라즈베리파이 네트워크 통신으로 ~/.bashrc를 수정했던게 문제가 된 것 같다.
수정했던 부분을 원상태로 돌려놓고 다시시도 해보자.
이후에 라즈베리파이와 통신할 때는 리모트PC에서 MASTER가 돌아가도록 호스팅해야 할 것이다.
터틀봇에서는 라즈베리파이에서 MASTER가 돌아가도록 한 것 같다.
-동작 Trajectory 저장
블로그를 따라 키보드의 1번을 누르고 동작을 수행한뒤 2번을 눌러 저장하였다.
그런데 이 데이터가 어디에 저장되지!?!?
저장된 거 어떻게 실행하지!?
지금까지 한 것을 정리하자면
1. ~/catkin_ws/src/open_manipulator_applications/open_manipulator_master_slave/src에서
open_manipulator_master.cpp을 수정해 open_manipulator_recording_trajectory.cpp을 만들고
2.~/catkin_ws/src/open_manipulator_applications/open_manipulator_master_slave/launch에서
open_manipulator_master.launch를 수정해 open_manipulator_recording_trajectory.launch를 만들었다.
3. ~/catkin_ws/src/open_manipulator_applications/open_manipulator_master_slave에서
CMakeLists.txt에 몇 코드를 첨가해 1,2의 수정사항을 빌드해준다.
이제 다음 단계로 넘어간다.
suho0515.blogspot.com/2019/11/pick-and-place-using-inceptionv3-in-ros_13.html
[Pick and Place using Inception_v3 in ROS] #03. Making open_manipulator_play_recorded_trajectory node
#02까지는 Manipulator의 trajectory를 recording 하는 소스코드를 구현하였다. #03에서는 인식된 Object에 따라서 각각의 Trajectory를 수행하도록 할 것이다. PC Enviroment ( Labtop ) ...
suho0515.blogspot.com
'기계공학부 시절의 기록 > ROS일기' 카테고리의 다른 글
| 라즈베리파이 노드에서 영상처리하기 (0) | 2021.04.22 |
|---|---|
| 저장된 경로 읽어 움직이기/영상송수신 (0) | 2021.04.21 |
| 라즈베리파이, PC 연결성공 (0) | 2021.04.20 |
| 매니퓰레이터 with PI카메라(링크기록) (0) | 2021.04.19 |
| ROS강의 CH.4 중요컨셉 (0) | 2021.04.13 |


댓글